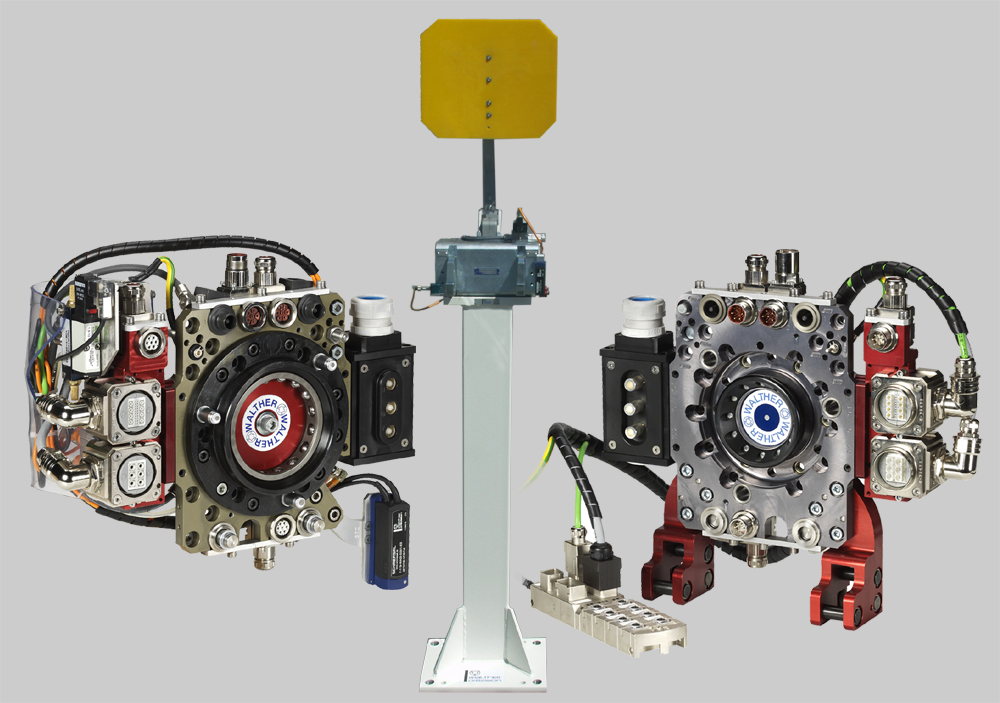
Werkzeugwechselsystem






Relevante Bilder













{kind=link}
Relevante Artikel
IndustrieroboterEin Industrieroboter ist eine universelle, programmierbare Maschine zur Handhabung, Montage oder Bearbeitung von Werkstücken. Diese Roboter sind für den Einsatz im industriellen Umfeld konzipiert. Sie gehören in die Maschinenbau-Disziplin Automatisierungstechnik und werden dort oft auch als Handhabungssysteme bezeichnet. Der Industrieroboter besteht im Allgemeinen aus dem Manipulator (Roboterarm), der Steuerung und einem Effektor. Oft werden Roboter auch mit verschiedenen Sensoren ausgerüstet. Einmal programmiert ist die Maschine in der Lage, einen Arbeitsablauf autonom durchzuführen, oder die Ausführung der Aufgabe abhängig von Sensorinformationen in Grenzen zu variieren. .. weiterlesen
GreifsystemGreifsystem beschreibt die Arbeitsorgane eines Roboters. Dazu zählen Aktoren/Effektoren, aber auch erforderliche Hilfseinrichtungen, wie Handgelenkachsen, Wechselsysteme, Fügehilfen, Schutzeinrichtungen und Sensoreinheiten. .. weiterlesen
MultikupplungMultikupplungen und Dockingsysteme können mehrere fluidische, pneumatische und/oder elektrische Leitungen gleichzeitig verbinden bzw. trennen. Die Multikupplungen bzw. Dockingsysteme sind in der Regel zweiteilig und bestehen aus Trägerplatten, Medienkupplungen, Elektroelementen, Führungselementen und, je nach Bauform, zusätzlichen Bedienungs- und Verriegelungselementen. Soll das Dockingsystem in einen Steuerungsprozess einer automatisierten Produktionsanlage integriert werden, können zur Abfrage der einzelnen Kuppelschritte Näherungsinitiatoren zum Einsatz kommen. Die Bauform der Multikupplung bzw. des Dockingsystems ist abhängig vom Verwendungszweck. .. weiterlesen