Präzisionspendeluhr

links: „Type A“ mit Luftdruckkompensation
rechts: „Type D“ im Glaszylinder
Die Präzisionspendeluhr (PPU) ist eine ortsfeste Räderuhr, die als Zeitnormal für Zeitdienstzwecke und astronomische Beobachtungen gebaut wurde. In ihr wurde die mit einer Räderuhr im 19. und 20. Jahrhundert höchstmögliche Ganggenauigkeit verwirklicht.[1]
Kriterien
Das Funktionsprinzip einer Präzisionspendeluhr (PPU) unterscheidet sich nicht von dem einer „normalen“ Pendeluhr. Das Pendel schwingt mit einer durch die Pendellänge bestimmten Schwingungsdauer bzw. Frequenz. Im Zusammenspiel mit der Hemmung sorgt es für eine schrittweise Bewegung des Räderwerks, das von der Energiequelle der Uhr (meist Gewichtsantrieb) angetrieben wird. Der schrittweise Ablauf (und damit der Lauf der Zeit) wird durch ein mit dem Räderwerk verbundenes Zeigerwerk angezeigt.
Die einzelnen Baugruppen sind jedoch den hohen Anforderungen an ein Zeitnormal entsprechend ausgelegt, und die Uhr ist gegenüber den Umgebungsbedingungen weitgehend isoliert. Im Wesentlichen sind folgende Kriterien zu erfüllen:
- Qualitativ hochwertiges Werk
Das vom Antrieb gelieferte und vom Räderwerk übersetzte Drehmoment soll möglichst schwankungsfrei zur Hemmung übertragen werden, um einen konstanten Antriebsimpuls für das Pendel zu gewährleisten. Die Reibung der Lager und der Verzahnung sollte somit möglichst gering und gleichmäßig sein.
- Gewichtsantrieb
Dieser dient ebenfalls dazu, das Antriebsmoment möglichst konstant zu halten, was mit einem Gewichtsantrieb besser gelingt als mit einem Federantrieb.
- Hochwertige Hemmung
Die Ganggenauigkeit der Uhr hängt wesentlich davon ab, dass die freie Schwingung des Gangreglers (Pendel) durch die Hemmung möglichst wenig gestört wird. Außerdem wird oft eine Federkraft- oder Schwerkrafthemmung eingesetzt, die den je Schwingung auf das Pendel übertragenen Antriebsimpuls vom Antriebsmoment (weitgehend) unabhängig macht. Entsprechendes gilt bei elektrisch betriebenen Uhren für die Übertragung des Antriebsimpulses auf das Pendel bzw. die Fortschaltung des Räderwerks durch das Pendel.
- Temperaturkompensation
Die Schwingungsdauer des Pendels (und damit der Gang der Uhr) hängt von der Pendellänge ab, und diese wiederum wegen der Wärmeausdehnung des Werkstoffs von der Temperatur. Diese Temperaturabhängigkeit kann durch ein Kompensationspendel minimiert werden. Andererseits kann die Gangabweichung durch Einhaltung einer konstanten Temperatur vermieden werden.
- Kompensation des Luftdrucks
Die Pendelschwingungsdauer ist auch vom Luftdruck (Luftwiderstand, Auftrieb) abhängig. Deshalb werden für höchste Anforderungen evakuierte Gehäuse oder Vorrichtungen zur Luftdruckkompensation verwendet.
- Klare Anzeige der Sekunde
Die Anzeige soll sekundengenau sein. Deshalb werden sogenannte Sekundenpendel verwendet, deren Schwingungsdauer 2s beträgt. Der am Sekundenrad angebrachte Sekundenzeiger bewegt sich dann im Sekundentakt, da das Räderwerk je Schwingung zweimal weitergeschaltet wird. Eine Anzeige von Bruchteilen einer Sekunde ist damit nicht möglich. Entsprechende Genauigkeitsangaben beruhen auf der Mittelung der Zeitanzeige über einen längeren Zeitraum bzw. dem Abgleich der Uhr mit der Sternzeit unter Zuhilfenahme der Auge-Ohr-Methode und von Kurzzeitmessern (z. B. Chronoskop von Hipp)[2][3].
- Lange Laufdauer
Da das Aufziehen der Uhr immer eine gewisse Störung ihres Ablaufs darstellt (z. B. indem beim Öffnen des Gehäuses die Pendelbewegung durch die veränderte Luftströmung beeinflusst wird), will man eine große Laufdauer (Zeit bis zum nächsten Aufziehen) erreichen. Dazu ist eine möglichst große „Fallhöhe“ der Antriebsgewichte zweckmäßig. Auch nutzt man schwere Gewichte, die beim Absinken entsprechend mehr Energie abgeben. Auch elektrische Aufzüge werden verwendet, um das manuelle Aufziehen ganz zu vermeiden.
Geschichte
England und Frankreich haben durch ihre wissenschaftlichen Gesellschaften (Royal Society und Académie des sciences) schon im 17. Jahrhundert die Naturwissenschaften gefördert und deren Ergebnisse in Journalen zeitnah verbreitet, sodass Neuerungen schnell bekannt wurden und umgesetzt werden konnten. Auf diese Weise standen sich beide Nationen in der zweiten Hälfte des 18. Jahrhunderts als führende Seefahrernationen in der Herstellung genau gehender Uhren konkurrierend gegenüber.
Bis zum Ende des 19. Jahrhunderts waren bei Präzisionspendeluhren die Grahamhemmung und das Rostpendel bzw. das Quecksilberpendel die entscheidenden Baugruppen einer PPU (neben der qualitativ hochwertigen Ausführung aller Bauteile).
Zwar wurden alle Erfindungen im Uhrensektor durch Veröffentlichungen auch in Deutschland bekannt, aber moderne Techniken wurden hier erst mit großer Zeitverzögerung angewandt. Es spielte dabei einerseits die politische Situation (Dreißigjähriger Krieg), andererseits die traditionellen Einstellungen und die strengen Zunftordnungen in den Uhrmacherzentren wie Augsburg und Nürnberg eine große Rolle.[4] Der technische Durchbruch in Deutschland kam erst Anfang des 19. Jahrhunderts.
Konstruktive Vollendung der Präzisionspendeluhr
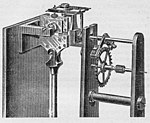 Freie Federkrafthemmung von Strasser
Freie Federkrafthemmung von Strasser Freie Federkrafthemmung von Riefler
Freie Federkrafthemmung von Riefler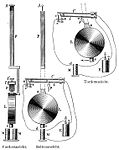 Elektrische Präzisionspendeluhr von Matthäus Hipp
Elektrische Präzisionspendeluhr von Matthäus Hipp Shortt Präzisionspendeluhr (Synchronome)
Shortt Präzisionspendeluhr (Synchronome) Schuleruhr (Prinzip)
Schuleruhr (Prinzip)
Die rein mechanische Präzisionsuhr wurde von Sigmund Riefler (1847–1912) perfektioniert und auf der Basis zweier Patente (Riefler-Pendel und Schwerkraft-Hemmung) sowie der Riefler-Federkrafthemmung bis zu Ganggenauigkeiten von unter einer Zehntelsekunde pro Tag gesteigert[5]. Ähnlich gute Zeitmessergebnisse erzielte Ludwig Strasser mit der von ihm entwickelten Strasserhemmung[6].
Riefler und Strasser waren einerseits Konkurrenten, andererseits arbeiteten sie aber auch zusammen. So kaufte Riefler Rohwerke von Strasser, die er mit seinen Hemmungen und Pendeln versah, während Strasser Pendel von Riefler bezog.
Als Zeitnormal wurden Riefler-Uhren bis etwa 1965 gebaut und dann durch noch genauere Quarzuhren verdrängt.[7]
Pendeluhren, deren Pendel nicht durch eine Hemmung, sondern elektrisch angetrieben wurden, entwickelten u. a. Matthäus Hipp und William Hamilton Shortt (1881–1971). Die Shortt-Uhr um 1921 erreichte durch zwei synchronisierte Pendel und deren elektrisch dosierte Reibungskompensation sogar 0,01 s/Tag. Nachteilig bei diesen Konzepten war, dass der Antriebsimpuls zwar elektrisch ausgelöst, jedoch immer noch mechanisch auf das Pendel übertragen wurde (Shortt)[8][9] bzw. mechanisch vom Pendel ausgelöst und elektromagnetisch auf dieses einwirkte (Hipp).[10] Eine wirklich freie Pendelschwingung war auf diese Weise nicht gegeben.
Das Problem löste Maximilian Schuler mit seinem elektromagnetisch angetriebenen Schuler-Pendel, das über eine Lichtschranke eine (mechanische) Arbeitsuhr von Riefler synchronisierte, die ihrerseits elektrische Antriebsimpulse für das Schuler-Pendel auslöste. Die Impulse wurden auf eine feststehende Spule übertragen, deren elektromagnetisches Feld auf einen am Pendel befestigten Permanentmagneten einwirkte (siehe Schuleruhr).[11][12]
Die weltweit in den Observatorien verwendeten Präzisionspendeluhren (mechanisch oder elektrisch) wurden von den Herstellern Strasser&Rhode (Glashütte), Riefler (Nesselwang und München), Schuler (Göttingen) und Shortt (England) dominiert[13].
Elektrische Pendeluhren konnten sich jedoch nicht in größerem Maßstab durchsetzen, da die zu damaliger Zeit (1930er Jahre und davor) zur Verfügung stehenden elektrischen und elektronischen Bauelemente nicht die notwendige Zuverlässigkeit aufwiesen und die Uhren dadurch gegenüber den rein mechanischen sehr viel wartungsintensiver waren.
Die Entwicklung der Präzisionspendeluhr kam mit der Einführung der Quarzuhr zum Abschluss, deren Ganggenauigkeit gleich um drei Zehnerpotenzen besser war. Weitere Verbesserungen der PPU, wären möglich (z. B. Verwendung moderner elektronischer Bauelemente), sind aber unter dem Aspekt der Verbesserung der Zeitmesstechnik sinnlos. Der um 1935 erreichte Entwicklungsstand kann deshalb als Vollendung der PPU angesehen werden.
Für Sammler und Liebhaber werden Präzisionspendeluhren aber bis heute gefertigt.[14] Darunter gibt es auch solche mit überlangem 1¼-Sekunden-Pendel (1,7 m), das in 5 Sekunden nur viermal schwingt.[15]
Literatur
Erbrich, Klaus: Präzisionspendeluhren: von Graham bis Riefler; Callwey Verlag; München 1978; ISBN 3-7667-0-429-X
Weblinks
- watch-wiki: Präzisionspendeluhr
- Uhrenkabinett der Staatlichen Museen Kassel: Präzisionspendeluhr in druckdichtem Tank
Einzelnachweise
- ↑ Ermert Jürgen: Zu frühen Deutschen Präzisionspendeluhren; Ebner Verlag Ulm; Klassik Uhren 4/2009 S. 10f
- ↑ Oelschläger: Hipp's Chronoskop, zur Messung der Fallzeit eines Körpers etc. In: Polytechnisches Journal. Band 114, 1849, S. 255–259 (hu-berlin.de [abgerufen am 8. November 2020]).
- ↑ Das Hippsche Chronoskop. Abgerufen am 8. November 2020.
- ↑ Eva Grois: Das Augsburger Uhrmacher-Handwerk; Herausgeber: Maurice und Mayr; „Die Welt als Uhr“; Deutscher Kunstverlag; München Berlin 1980; S. 63f; ISBN 3-422-00709-1
- ↑ Bernhard Huber: Ingenieur der Präzision. Pendeluhren von Sigmund Riefler. Abgerufen am 7. November 2020.
- ↑ Strasser & Rohde 1875 - 1918. Abgerufen am 7. November 2020 (deutsch).
- ↑ Wiederentdeckung und Instandsetzung der Präzisionspendeluhr Riefler Nr.711
- ↑ Patent GB191112328A: An Improved Mechanism for Impelling Pendulums or Balance Wheels. Angemeldet am 22. Mai 1911, veröffentlicht am 22. Mai 1912, Erfinder: William Hamilton Shortt.
- ↑ Patent GB187814A: Improvements in the synchronisation of clocks. Angemeldet am 30. September 1921, veröffentlicht am 2. November 1922, Erfinder: William Hamilton Shortt.
- ↑ Patent DE4324C: Neuerungen an elektrischen Uhren. Angemeldet am 24. April 1878, veröffentlicht am 22. März 1879, Erfinder: M. Hipp.
- ↑ Patent DE561269C: Pendel für Zeitmessungszwecke. Angemeldet am 9. Oktober 1931, veröffentlicht am 12. Oktober 1932, Erfinder: Max Schuler.
- ↑ Patent CH158879A: Zeitmesseinrichtung. Angemeldet am 10. Oktober 1931, veröffentlicht am 15. Dezember 1932, Erfinder: Max Schuler.
- ↑ Scheibe, Adelsberger. Physiker und Uhrenbauer aus Deutschland. Abgerufen am 14. Juni 2019.
- ↑ Präzisionspendeluhren von Erwin Sattler
- ↑ Naeschke-Standuhr NL 125 (Seite nicht mehr abrufbar, festgestellt im April 2024. Suche in Webarchiven)
Auf dieser Seite verwendete Medien

Autor/Urheber: Manfredgoellner, Lizenz: CC BY-SA 4.0
Schuler-Pendel mit Arbeitsuhr

A Shortt-Synchronome free pendulum clock belonging to the US National Institute of Standards and Technology (NIST), in the NIST Museum, Gaithersburg, Maryland, USA. Invented in 1921 by William Hamilton Shortt, it was the most accurate mechanical clock ever manufactured, achieving an accuracy of around one second per year. This example was purchased by NIST in 1929 and used by physicist Paul R. Heyl in his second determination of the gravitational constant. It consists of a master invar pendulum (left) in a copper vacuum tank and a precision pendulum clock (right). The units are connected by electric wires that operate electromagnets to keep the slave pendulum in the clock synchronized to the master pendulum. The pendulum in the clock is attached to the clock's mechanism and performs the function of moving the clock's gears, leaving the master pendulum to swing virtually free of outside influence. The pendulums make one swing per second, and every 30 swings the slave clock gives the master pendulum a push to keep it swinging. Alterations to image: brightened slightly, changed from GIF to JPEG.
Riefler Uhren; Links: Uhr "Type A" mit Luftdruckkompensation; Rechts: Uhr "Type D" im Glaszylinder

Freie Federkrafthemmung nach Ludwig Strasser

Drawing of Riefler escapement, invented by Sigmund Riefler in 1889, from the catalog of the Columbian Exposition, Chicago, 1893. It was used in the precision astronomical regulator clocks produced by the German firm Clemens Riefler from 1890 to 1965. The escapement's advantage was that it applied impulses to keep the pendulum swinging by flexing the suspension spring (i) that supported the pendulum, rather than applying force directly to the pendulum. The spring is attached to a metal support (A) that rocks back and forth on knife edges (c) resting on agate plates (P). Riefler clocks achieved an accuracy of 10 milliseconds per day, possibly the most accurate all-mechanical clocks ever made. Alterations to image: rotated image 90° CW, rotated R drawing a few degrees to justify, moved R drawing closer to L and aligned drawings vertically, converted to 32 color PNG.

Elektrische Pendeluhr von Matthäus Hipp