Lenkung
Als Lenkung bezeichnet man die Vorrichtung zur Beeinflussung der Fahrtrichtung von Fahrzeugen jeglicher Art. Dieser Artikel beschäftigt sich vor allem mit der Lenkungstechnik an zweispurigen Landfahrzeugen, insbesondere mit der Achsschenkellenkung.
Entwicklung
Kutschen als Vorgänger der motorisierten Fahrzeuge hatten eine Schwenkachslenkung (oder Drehschemellenkung). Dabei wird der vordere starre Achskörper mit seinen an beiden Enden gelagerten Rädern um einen in der Mitte befindlichen Bolzen horizontal geschwenkt. Diese Lenkung kommt heute noch oft an mehrachsigen Anhänger-Fahrzeugen vor. Wegen der hohen Lenkkräfte war die Steuerung eines selbst fahrenden Fahrzeugs kaum möglich.[1] Um den Problemen mit zwei gelenkten Rädern aus dem Weg zu gehen, wurde der Benz Patent-Motorwagen Nummer 1 als Dreirad mit Steuerkopflenkung gebaut. Das Prinzip der Steuerkopflenkung wurde auch noch beim vierrädrigen Daimler Stahlradwagen von 1889 verwirklicht, bei dem zwei Spurstangen die Drehbewegung der Lenkpinne auf die Gabeln übertrugen.[2] Das erste Fahrzeug mit Verbrennungsmotor und der von Carl Benz im Jahre 1893 patentierten Achsschenkellenkung[3][4] war 1893 der Benz Victoria.[5] Die Spurstangen waren an einem mittig angeordneten achsfesten Lenkstockhebel angelenkt. Die Achsschenkellenkung, die bereits im Jahr 1761 von Erasmus Darwin erfunden und erstmals 1816 von dem Hofwagner Georg Lankensperger aus München patentiert wurde, setzte sich in Verbindung mit einer Starrachse allgemein durch.
Mit dem Aufkommen von Einzelradaufhängungen und höheren Geschwindigkeiten musste das Lenkverhalten verbessert werden. Bewegungen der Starrachsen bei Bodenunebenheiten führten zu ungewollten Lenkeinschlägen und Stößen in der Lenkung. Die Schwenkbewegung der Lenkgetriebewelle wurde in unterschiedlichen Ausführungen des Lenkgestänges auf die beiden Spurstangen übertragen. Durch die Pfeilung der Spurstangen ergaben sich erweiterte Möglichkeiten die Radeinschläge nach Ackermann zu verwirklichen. Mit der Entwicklung von Kugelgelenken konnten auch wichtige Lenkungskenngrößen wie z. B. der Lenkrollradius den steigenden Anforderungen, die sich durch ABS ergaben, angepasst werden. Die Zahnstangenlenkung, die bei vielen frontgetriebenen Fahrzeugen mit Quermotor bereits Standard war, setzte sich Mitte der 1990er-Jahre auch in der Oberklasse durch.
Zur Reduktion der Bedienkräfte wurden hydraulisch unterstützte Servolenkungen entwickelt, teilweise mit geschwindigkeitsabhängiger Unterstützung. Trotz verringerter Bedienkräfte wurden direktere Lenkungen für sportlicheres Fahrverhalten möglich. Aus Gründen der Energieeinsparung wurde bei Zahnstangenlenkung die hydraulische durch eine elektrische Unterstützung abgelöst. Diese bot auch die Möglichkeit von Assistenzfunktionen, die sich auf das Lenkradmoment auswirken, z. B. der Spurassistent.
Die Beeinflussung des Lenkverhaltens durch ungleiche Bremskräfte kurvenaußen und kurveninnen ist schon länger Stand der Technik. Bei Fahrzeugen mit Allradantrieb werden auch die Antriebskräfte durch Torque Vectoring so verteilt, wie es der Fahrsituation entspricht.
Hinterachslenkungen werden zunehmend Standard in der Oberklasse. Die Vorderachslenkung wird um Funktionen zur Stabilisierung des Fahrzeugs mittels Überlagerungslenkung erweitert. Aus Sicherheitsgründen gibt es aber immer noch eine mechanische Verbindung vom Lenkrad zu den Rädern. Das ist auch bis Level 4 beim autonomen Fahren der Fall, damit der Fahrer jederzeit die Kontrolle übernehmen kann. Erst bei Level 5 wird auf den Fahrer völlig verzichtet, ein Lenkrad ist nicht mehr erforderlich.
Die Lenkung ist für die Fahrsicherheit von zentraler Bedeutung. Für die Lenkanlagen von Kraftfahrzeugen und Kraftfahrzeuganhängern für den Straßenverkehr in Europa sind die EG-Richtlinien 70/311/EWG[6] und 75/321/EWG[7] sowie die damit äquivalente ECE-Regel ECE-R 79 zu beachten. Die deutsche Straßenverkehrs-Zulassungsverordnung verweist ihrerseits in §38(2) „Lenkeinrichtung“ und dem zugehörigen Anhang auf diese EG-Richtlinie.
Schwenkachs-/Drehschemellenkung

Bei der Schwenkachslenkung wird der starre Achskörper mit den an seinen Enden gelagerten Rädern als Ganzes um einen zentralen Bolzen, den „Königsbolzen“, geschwenkt. Die Aufstandsfläche des Fahrzeugs verringert sich jedoch beim Schwenken der Achse immer mehr vom Viereck bis hin zu einem Dreieck bei einer 90°-Stellung, was die Kippstabilität verringert.
Die Konstruktion mit „Königsbolzen“ wurde zur Übertragung des Kippmoments zwischen Achse und Fahrzeug beim Ausschwenken zu einem schemelartigen Gebilde erweitert, dem Drehschemel oder „Drehkranz“, der in aufwändigen Fällen mit Kugelgelenk ausgestattet sein kann.
Frühe Dampfwagen, dampfgetriebene Straßenwalzen oder einfache selbstfahrende Fahrzeuge wie Seifenkisten wurden mit Schwenkachslenkung ausgestattet. Sie wird auch bei Kutschen und anderen Pferdewagen sowie allgemein bei mehrachsigen Anhängern eingesetzt, da die Deichsel zum Ziehen des Fahrzeugs hier auf einfache Weise zugleich auch zur Ansteuerung der gelenkten Achse dienen kann.
Dreirädrige Lastenfahrräder mit zwei Vorderrädern und vornliegender Ladefläche haben überwiegend eine Schwenkachslenkung. Dabei wird die Ladefläche oder -kiste mit der Achse geschwenkt.[8]
Steuerkopflenkung
Die Steuerkopflenkung oder Gabellenkung wird überwiegend bei einspurigen Fahrzeugen verwendet, kam aber auch im vierrädrigen Daimler Stahlradwagen zum Einsatz. Die Lenkachse liegt in der Radebene und ist leicht nach hinten oben geneigt um den erforderlichen Nachlauf zu gewährleisten.
Außer bei einspurigen (Fahrrädern, Motorrollern) wird sie auch bei dreispurigen Fahrzeugen angewendet. Das einzelne Vorder- oder auch Hinterrad wird geschwenkt, so bei klassischen Dreirädern und auch bei Rollstühlen und hinten gelenkten Gabelstaplern.
Bestandteile der Steuerkopflenkung
- Radgabel,
- Lenkkopf (Motorrad) bzw. Steuersatz (Fahrrad)
- Motorradlenker bzw. Fahrradlenker

#3 Lenkköpfe
#11 Lenkhebel
#12 Doppelrohrsystem
Duplex-Lenkung
Unter dem Namen Duplex-Lenkung ist eine Vorderradaufhängung für Motorräder mit zwei Lenkköpfen bekannt. Darin sind die Lenkwellen gelagert, an deren Enden die Lenkhebel befestigt sind. Sie bilden zusammen mit dem Rad bzw. dem Lenker jeweils ein oberes und unteres Lenktrapez. Durch die Momentanpole der beiden Lenktrapeze verläuft die ideelle Lenkachse, die bei Lenkeinschlag nicht in der Radebene liegt. Das Rad ist an einem Doppelrohrsystem federnd gelagert, das von den Lenkhebeln bewegt wird. In der Patentschrift wird auf die Steifigkeit dieser Lenkung verwiesen.[9] Durch die Lenkhebel die schnell eine Strecklage erreichen, ist der Lenkeinschlag begrenzt.
Achsschenkellenkung
Radeinschläge nach Ackermann

Beide Räder sollen bei Kurvenfahrt mit geringer Querbeschleunigung auf einer Kreisbahn mit gleichem Mittelpunkt rollen, dem Momentanpol der Bewegung. Bei der Drehschemellenkung ist das automatisch der Fall. Bei der Achsschenkellenkung müssen die Räder unterschiedlich geschwenkt werden, das innen liegende stärker als das außen liegende. Bei Starrachsen mit durchgehender Spurstange erreicht man das mit der Bildung des sogenannten Lenktrapezes aus dem Achskörper, den beiden leicht nach innen weisenden Spurhebeln an den Achsschenkeln und einer Spurstange, die kürzer als der Achskörper ist. Dadurch entstehen beim Schwenken der Räder ungleich lange wirksame Hebelarme, so dass sich die Verlängerungen aller Radachsen ungefähr im Kurvenmittelpunkt schneiden (Ackermann-Prinzip). Ein Hinweis auf ein richtig dimensioniertes Lenktrapez ist die Tatsache, dass sich die verlängerten Lenkhebel an den Achsschenkeln in Geradeausstellung in der Mitte der Hinterachse treffen (s. Abbildung). Bei Einzelradaufhängungen trifft diese Einschränkung nicht zu, da sich die Ackermannbedingung durch entsprechende Pfeilung der Spurstangen einhalten lässt. Moderne Fahrzeuge sind auch nicht streng nach Ackermann ausgelegt, sondern haben etwas geringere Spurdifferenzwinkel, da andere Kriterien wie Wendekreis oder die Lenkungsrückstellung berücksichtigt werden.
Die Ackermannlenkung wurde erstmals 1816 von dem Hofwagner Georg Lankensperger aus München patentiert. Dieser überließ sie in England dem Verleger und Unternehmer Rudolph Ackermann, weshalb sie dort unter dem Begriff „A-Steering“ bekannt wurde. An Ackermann erinnert auch die Bezeichnung desjenigen Lenkwinkels als Ackermann-Winkel der bei langsamer Kurvenfahrt durch das Verhältnis von Radstand und Radius definiert ist und die Ackermann-Funktion, welche die Spurwinkeldifferenz zwischen dem kurveninneren und dem kurvenäußeren Rad beschreibt, die vom Lenkwinkel des kurveninneren Rades, vom Radstand und der Spurweite abhängt. Weitere Patente erhielten Amédée Bollée 1876 in Frankreich[10] und Carl Benz 1893.[11][12][13]
Unter der Maßgabe, dass der Momentanpol auf einer Geraden senkrecht zur Fahrzeuglängsachse liegt, lassen sich die Spurdifferenzwinkel nach Ackermann für beliebig viele gelenkte Achsen ermitteln. Die Lage des Momentanpols ergibt sich aus der Position der ungelenkten Achsen, denn diese müssen mit möglichst geringem Schräglaufwinkel abrollen.
Einzelradaufhängung


1 Lenkrad
2 Lenksäule
3 Lenkgetriebe
4 Spurstangen
5 schwenkbare Rad-Achsschenkel
6 Spurhebel
7 Zwischenstange
8 Lenkstockhebel
9 Zwischenhebel
Die beiden Achsschenkel oder Radträger sind um je eine eigene, leicht geneigte Achse schwenkbar gelagert. Die Spreizachse war ursprünglich durch einen Achsschenkelbolzen festgelegt. Bei modernen Fahrwerken sind ideelle Spreizachsen üblich, wie sie sich z. B. durch einen aufgelösten unteren Dreieckslenker ergeben. Damit sind Spreizachsen möglich, die teilweise weiter außen als das Rad liegen. Zum koordinierten Schwenken sind die Radträger gelenkig über das Lenkgestänge miteinander verbunden.[14] Die Drehung des Lenkrads wird über das Lenkgetriebe und das Lenkgestänge auf die Räder übertragen. Das Lenkradmoment gibt dem Fahrer eine Rückmeldung über den Fahrzustand. Es darf aus Sicherheitsgründen einen Maximalwert nicht übersteigen.[15] Das Produkt aus Lenkgetriebeübersetzung und Gestängeübersetzung (Gesamtlenkübersetzung) muss bei Fahrzeugen ohne Lenkunterstützung entsprechend indirekt ausgelegt sein. Bei Fahrzeugen mit Servolenkung ist eine direktere Gesamtlenkübersetzung möglich.
Im Fahrbetrieb wirken bei Kurvenfahrt Seitenkräfte und Reifenrückstellmomente auf das Rad. Durch gezielte Elastizitäten im Lenksystem und der Radaufhängung (Elastokinematik) stellen sich Radlenkwinkel ein, die geringer sind als auf Grund der Lenkübersetzung zu erwarten wäre. Die Elastizitäten tragen zum untersteuernden Verhalten des Fahrzeugs bei.
Bestandteile der Achsschenkellenkung
- Radträger
- Achsschenkelbolzen oder Kugelgelenke zum Anschluss an die Radaufhängung
- Spurhebel am Radträger
- Spurstangen (teilweise Zwischenstange (Lenkstange), Zwischenhebel und Lenkstockhebel)
- Lenkgetriebe,
- Lenksäule,
- Lenkrad
Zahnstangenlenkung
Bei Zahnstangenlenkung sind die Spurstangen unmittelbar an der Zahnstange angelenkt und verbinden sie mit den Spurhebeln. Man unterscheidet die Anbindung seitlich an der Zahnstange und den Mittenabgriff. Das „Lenkdreieck“ gebildet aus den Anlenkpunkten der Spurstange und einem Punkt auf der Spreizachse bestimmt den Spurdifferenzwinkel.
Spindel- oder Kugelumlauflenkung
Im einfachsten Fall sind die Spurstangen direkt mit dem Lenkstockhebel verbunden z. B. beim VW Käfer, was eine Asymmetrie zur Folge hat. Ein spiegelsymmetrisch angeordneter Lenkstockzwischenhebel der über die Lenkstange mit dem Lenkstockhebel verbunden ist, weist diesen Nachteil nicht auf. Die Spurstangen können an den Lenkstockhebeln oder der Lenkstange angelenkt sein (Mercedes-Benz W 202).
Lenkgeometrie

Spur (Spurwinkel) und Sturz bestimmen sich durch die Lage der Radachse, Spreizungs- und Nachlaufwinkel, Lenkrollradius und Nachlaufstrecke durch die Lage der Lenkachse.[16]
Vorspur
Spurdifferenzwinkel
Der Spurdifferenzwinkel ist die Winkeldifferenz, um die das kurvenäußere Rad gegenüber dem kurveninneren Rad weniger weit eingeschlagen wird, sodass ein rutschfreies Abrollen der gelenkten Räder möglich wird. Bei der Achsschenkellenkung, die auch bei einzeln aufgehängten Rädern verwendet wird, kann ein geeigneter Spurdifferenzwinkel durch Anwendung des Ackermann-Prinzips erreicht werden. Je nach Herstellervorgabe wird der Spurdifferenzwinkel entweder am Außenrad durch ein 20° eingeschlagenes Innenrad gemessen, oder umgekehrt. Jedenfalls ist die Messung jeweils mit nach links und nach rechts eingeschlagenen Rädern auszuführen. Stimmen die Spurwinkel hierbei nicht überein, liegt ein Fehler bei der Spureinstellung der einzelnen Räder vor. Lassen sich die Einstellung der Spur- und Spurdifferenzwinkel nicht in Einklang bringen, ist von verbogenen Lenkungsteilen auszugehen.[17]
Sturz
Die Radachsen oder Achsstummel stehen nicht genau horizontal, sondern weisen am äußeren Ende leicht nach unten oder nach oben. Der erstgenannte Fall wird fahrzeugbezogen positiver Sturz genannt. Negativer Sturz gleicht teilweise die Wankneigung in Kurven aus und ermöglicht höhere Seitenführungskräfte in der Kurve. Für den Geradeauslauf ist entscheidend, dass der Sturz rechts und links gleich groß ist. Das Fahrzeug hat stets das Bestreben, auf die Seite zu ziehen, auf der das Rad einen zu großen Sturz hat.
Spreizung
Die Schwenkachsen der Räder sind in der Regel leicht nach innen geneigt, so dass die Verlängerung der Schwenkachse die Aufstandsfläche des Rads möglichst nah an deren Mittelpunkt schneidet. Dadurch verkleinert sich der Lenkrollradius. Bremskräfte zum Beispiel durch Bremsen auf einseitiger Glätte oder ABS-Eingriffe sind weniger stark am Lenkrad spürbar. Bei positivem Lenkrollradius bewirkt die Spreizung beim Einschlag ein leichtes Anheben des Wagenvorderteils, was eine selbsttätige Rückstellung in den Geradeauslauf bewirkt, auch bei Stillstand (Rückstellmoment).
Sturz- und Spreizungswinkel hängen direkt voneinander ab und bilden zusammen in der Regel einen konstruktiv festgelegten, unveränderlichen Gesamtwinkel. Daher wird herstellerseitig auf eine Angabe des Spreizungswinkels teilweise ganz verzichtet. Ist der Spreizungswinkel rechts und links trotz korrektem Sturz unterschiedlich groß, kann dies in einem verbogenen Achsschenkel seine Ursache haben.[17]
Stoßradius und Störkrafthebelarm
In der Ansicht von hinten auf das Rad hat die Spreizachse vom Radmittelpunkt die Abstände Stoßradius rσ und Störkrafthebelarm rSt. Ihr zur Fahrbahn paralleler Abstand ist der Stoßradius, ihr kleinster Abstand ist der Störkrafthebelarm. Beide Werte sind positiv, wenn der Radmittelpunkt weiter als die Spreizachse von der Fahrzeugmitte entfernt ist. Sie sollen speziell bei Frontantrieb möglichst klein sein, damit Antriebskräfte keine störenden Kräfte in der Lenkung verursachen.
Nachlaufwinkel, Nachlaufstrecke
Das auf das Lenkrad wirkende Rückstellmoment bei Kurvenfahrt entsteht im Wesentlichen durch das Reifenrückstellmoment und durch das Moment von Seitenkraft und Nachlaufstrecke der Räder. Diese entsteht durch die leichte Neigung der Spreizachsen (Nachlaufwinkel) nach hinten oben in der Projektion auf die Fahrzeuglängsebene und den Nachlaufversatz. Die Nachlaufstrecke ist definiert als Abstand zwischen dem Durchstoßpunkt der Spreizachse auf der Fahrbahn und dem Radaufstandspunkt in einer Ansicht seitlich auf das Rad.
Gewichtsrückstellung
Die Gewichtsrückstellung entsteht durch das Moment der Radlast um die geneigte Spreizachse. Die Wirkungen beider Räder summieren sich am Lenkrad. Das Rückstellmoment nimmt mit dem Lenkeinschlag zu und ist daher die Voraussetzung für die Selbstzentrierung der Lenkung in Geradeausstellung.
Andere Bauarten bei zweispurigen Fahrzeugen
Knicklenkung

Bei der Knicklenkung besteht das Fahrzeug aus zwei Teilen mit je einer meistens ungefederten Starrachse. Beide Teile sind durch ein um eine vertikale Achse drehendes Gelenk miteinander verbunden. Das Lenken erfolgt durch Schwenken der beiden Fahrzeugteile gegeneinander. Im Vergleich mit der ebenfalls eingelenkigen Schwenkachslenkung ist die Aufstandsfläche im geschwenkten Zustand und damit die Standsicherheit größer.
Die Knicklenkung eignet sich in erster Linie für kurze und eher langsamfahrende Fahrzeuge. Massen, die sich vor der Vorder- oder hinter der Hinterachse befinden (wie etwa Schaufeln und andere Arbeitsgeräte), wirken bei Fahrzeugen mit Knicklenkung stabilisierend. Das Fahrzeug wird durch die Knicklenkung in einen vorderen und einen hinteren Teil separiert, die sich gegenseitig stützen. Je gleichmäßiger sich die jeweilige Achslast auf den Bereich vor und den Bereich hinter der betreffenden Achse aufteilt, desto geringer ist die Kippgefahr bei Lenkbewegungen des Fahrzeugs.
Die Kombination von Knicklenkung und Achsschenkellenkung wird als Stereolenkung bezeichnet.

Panzerlenkung, Lenkbremse
Bei der sogenannten Panzerlenkung wird die Richtungsänderung meist mit zwei Hebeln, rechts und links vom Fahrer, eingeleitet und der Antrieb auf der Innenseite der Kurve abgebremst. Die unterschiedlichen Drehzahlen der beiden angetriebenen Ketten von Panzern und anderen Kettenfahrzeugen (wie Raupenfahrzeuge) und auch der Räder von Radfahrzeugen (z. B. Kompakt- und Hoflader) bewirken ein Lenken zur langsamer drehenden Seite hin.
In der einfachsten Form geschieht das durch eine Lenkbremse mit Bremsbändern, die jedoch schnell verschleißen. Daher wird meist ein Überlagerungslenkgetriebe verwendet, das auch die Antriebsverluste minimiert.
Im August 2024 erschien eine Regelung der FIA für Rennwagen, die asymmetrisch wirkende Bremsen, also das Bremslenken, verbietet.[18]
Das stehstabile zweispurige Zweirad Dicyclet des Amsterdamer Künstlers Fred Abels wird mit Pedalkurbel und über ein Differentialgetriebe angetrieben und nur durch zwei Handbremsen gelenkt.[19]
Lenkungsarten in Bezug auf die Fahrzeug-Achsen
Lenkung einer Achse (Zweiradlenkung)
Bei der Zweiradlenkung werden die beiden Räder derselben Achse gelenkt. Dies ist die gängigste Form der Lenkung bei Straßenfahrzeugen.
- Hinterradlenkung wird nur bei langsam fahrenden Fahrzeugen mit bauartbedingter Höchstgeschwindigkeit angewandt, da der Regelkreis Fahrer/Fahrzeug bei höheren Geschwindigkeiten instabil wird. Fahrzeuge wie Gabelstapler mit großem vorderem Überhang und Hinterradlenkung profitieren von erhöhter Wendigkeit. Bei Gabelstaplern und Mähdreschern vereinfacht die Hinterradlenkung die Konstruktion der hoch belasteten Vorderachse.
 Hinterradlenkung
Hinterradlenkung Gabelstapler mit Hinterradlenkung
Gabelstapler mit Hinterradlenkung
- Vorderradlenkung ist die übliche Lenkung bei den meisten Kraftfahrzeugen. Bei 3-achsigen Fahrzeugen mit ungelenkten Hinterachsen (Doppelachse oder Tandemachse) werden die Hinterräder bei Kurvenfahrt schräg zur Rollrichtung geschoben und radieren dabei auf dem Untergrund. Durch den Reibungswiderstand zwingen sie dem Fahrzeug ein untersteuerndes Verhalten auf. Je enger die beiden Hinterachsen zusammen stehen, desto weniger wird die Lenkung behindert. Die gelenkte Vorderachse darf bei Fahrzeugen mit großen Nutzlasten nicht zu weit vorne stehen. Wenn aufgrund einer großen Zuladung auf der hinteren Ladefläche des Fahrzeugs ein zu geringer Anteil des Fahrzeug-Gesamtgewichts auf die Vorderachse wirkt, würden sonst die Vorderräder beim Lenken ihre Haftung verlieren.
 Vorderradlenkung
Vorderradlenkung T5 mit Vorderradlenkung
T5 mit Vorderradlenkung
Mehrere gelenkte Achsen in Kombination mit ungelenkten Achsen
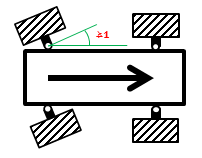
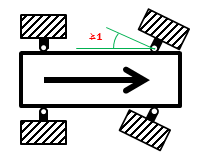
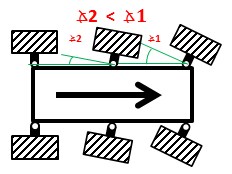
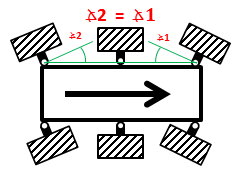
- Doppelvorderradlenkung wird die Lenkung zweier kurz hintereinander liegender Vorderachsen genannt. Die hintere Achse hat einen geringeren Lenkwinkel als die vordere Achse, um bei der Kurvenfahrt das Radieren der zweiten Achse zu vermeiden. Mit dieser Lenkung wird eine hohe vordere Achslast auf zwei Achsen verteilt. Die Alternative wäre es, die vorderen Reifen zu vergrößern, was bei vorne liegendem Motor jedoch den Motorraum einschränkt. Zwei angelenkte Vorderachsen sind bei Spezialfahrzeugen wie großen Autokranen anzutreffen. Vermehrt werden auch Baufahrzeuge wie Schüttguttransporter (Muldenkipper) und selbstfahrende Betonmischer damit ausgestattet. Die Übernahme einer höheren Last durch die beiden Vorderachsen verringert den Reifenverschleiß durch das Radieren der Reifen an den ungelenkten Hinterachsen bei Kurvenfahrt. Gelegentlich wird auch auf eine zweite Hinterachse verzichtet.
 Doppelvorderradlenkung
Doppelvorderradlenkung TPz FUCHS 2 mit Doppelvorderradlenkung
TPz FUCHS 2 mit Doppelvorderradlenkung
- Die Vorderrad-Hinterradlenkung wird bei 3-achsigen Nutzfahrzeugen mit doppelter Hinterachse verbaut. Bei ihr lenkt zusätzlich zur Vorderachse eine der beiden Hinterachsen mit. Ist die erste Hinterachse die Lenkachse, so lenkt diese gleichsinnig mit der Vorderachse. Die zweite Hinterachse als Lenkachse lenkt gegensinnig zur Vorderachse. Da ein Radieren der Hinterachsen vermieden wird, ist das Fahrzeug leichter zu handhaben. Insbesondere bei Anlenkung der hintersten Achse reduziert sich der Wendekreis. Anwendung vor allem bei schweren Lkw, die oft auf engem Terrain bewegt werden müssen (z. B. Müllwagen).
 Vorderrad-Hinterradlenkung
Vorderrad-Hinterradlenkung Von den acht Achsen des MZKT-79221 sind die vorderen drei und die hinteren drei Achsen lenkbar.
Von den acht Achsen des MZKT-79221 sind die vorderen drei und die hinteren drei Achsen lenkbar.
Allradlenkung
Eine Allradlenkung ermöglicht einen kleinen Wenderadius Eine Allradlenkung findet sich unter anderem bei landwirtschaftlichen Fahrzeugen oder bei Schwerlasttransportern. Man unterscheidet folgende Arten:
- Proportionallenkung
- bei der die Hinterräder in einem bestimmten Verhältnis zu den Vorderrädern eingeschlagen werden, beispielsweise das Vorderrad bewegt sich um 2°, das Hinterrad entsprechend um 0,4°.
- Gleichlauflenkung
- bei der die Vorder- und Hinterräder gleichmäßig verdreht werden, was zur Folge hat, dass bei konstanter Kurvenfahrt die Hinterräder genau in der Spur der Vorderräder laufen.
- Verzögerungslenkung
- bei der die Hinterräder erst angelenkt werden, wenn die Vorderräder einen bestimmten Lenkwinkel erreicht haben.
- Hundeganglenkung
- ist eine vor allem in der Landwirtschaft eingesetzte Lenkung. Dabei werden die Vorderräder und die Hinterräder in die gleiche Richtung ausgelenkt. Dies ermöglicht es, die Hinterräder auch bei Geradeausfahrt versetzt zu den Vorderrädern laufen zu lassen. Dies reduziert die Spurrinnenbildung und vermindert die Kippgefahr im steilen Gelände. Tandemwalzen können mit dieser Lenkung eine größere Fläche Walzasphalt walzen.
 Proportionallenkung
Proportionallenkung GMC Sierra Denali mit Proportionallenkung
GMC Sierra Denali mit Proportionallenkung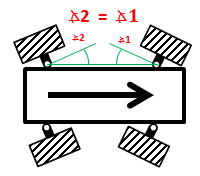 Gleichlauflenkung
Gleichlauflenkung Teleskoplader mit Gleichlauflenkung
Teleskoplader mit Gleichlauflenkung- Hundeganglenkung
 Teleskoplader im Hundegang
Teleskoplader im Hundegang
Bei PKW ist ein Lenkverhalten erwünscht, das sich mit proportional eingeschlagenen Rädern nicht erzielen lässt: kleiner Wendekreis mit gegensinnig einschlagenden Rädern bei niedriger Geschwindigkeit, erhöhte Fahrstabilität bei hoher Geschwindigkeiten mit gleichsinnig einschlagenden Rädern. Honda verwirklichte ein solches System ab 1987 im Modell Prelude. Mit einem Planetenrad-Lenkgetriebe an der Hinterachse wurden die Räder bei kleinem Lenkwinkel gleichsinnig, bei großem Lenkwinkel gegensinnig eingeschlagen. Moderne Systeme arbeiten mit rechnergesteuerten elektrischen Stellmotoren. Damit kann der Lenkeinschlag der Hinterräder in Abhängigkeit von der Fahrgeschwindigkeit und fahrdynamischen Größen unabhängig von der Stellung der Vorderräder eingestellt werden, um die Fahrstabilität zu verbessern. Solche Systeme können Teil einer Lenkung sein, die ohne mechanische Verbindung zwischen Lenkrad und Rädern bzw. ohne mechanische Kopplung der Hinterräder auskommt (Steer-by-Wire).
Lenkung von Wasserfahrzeugen und Flugkörpern

Die Lenkung von Wasserfahrzeugen und Flugkörpern wird meist Steuerung genannt. Sie wirkt als Schubvektorsteuerung oder auf dem Weg der Schubmodulation auf den Antrieb (zum Beispiel bei Hubschraubern oder Ruderbooten), über bewegliche Steuerflächen auf das umströmende Medium (Wasser oder Luft – über Höhen-, Seiten-, Querruder bei Flugzeugen und Steuerruder bei Schiffen) oder die Lenkung ist selbst eine eigene Kraftmaschine (zum Beispiel als Steuertriebwerke bei Raketen und Bugstrahlrudern bei Schiffen).
Eigenlenkung und Fernlenkung

Bodenfahrzeuge haben normalerweise eine Eigenlenkung, sie sind selbstgesteuert. Das Gegenteil, die Fernlenkung oder Fernsteuerung, überträgt die Lenkbefehle von außen auf das Fahrzeug, wie bei einem ferngesteuerten Modellauto oder einem Satelliten.
Literatur
- Erik Eckermann: Die Achsschenkellenkung und andere Fahrzeug-Lenksysteme. Deutsches Museum, München 1998, ISBN 3-924183-51-1.
- Anthony Bird, Edward Douglas-Scott Montagu of Beaulieu: Steam Cars, 1770–1970. Littlehampton Book Services, 1971, ISBN 0-304-93707-X (englisch).
- Michael Hilgers: Nutzfahrzeugtechnik: Chassis und Achsen – Kapitel Lenkung. Springer Vieweg, Wiesbaden 2016, ISBN 978-3-658-12746-6 (doi:10.1007/978-3-658-12747-3).
- Peter Pfeffer, Manfred Harrer (Hrsg.): Lenkungshandbuch: Lenksysteme, Lenkgefühl, Fahrdynamik von Kraftfahrzeugen. 2. Auflage. Springer Vieweg, 2013.
Weblinks
- Steering Equipment, Regelung TRANS/WP.29/GRRF/2002/5 (PDF; 110 kB) der Economic Commission for Europe
Einzelnachweise
- ↑ Peter Pfeffer, Manfred Harrer (Hrsg.): Lenkungshandbuch: Lenksysteme, Lenkgefühl, Fahrdynamik von Kraftfahrzeugen. 2. Auflage. Springer Vieweg, 2013, S. 10–14 (eingeschränkte Vorschau in der Google-Buchsuche): „Auf Grund des großen Hebelarms zwischen Rad und Drehachse entstanden beim Überfahren einseitiger Hindernisse für den Fahrer nur schwer beherrschbare Lenkkräfte an der Lenkpinne.“
- ↑ Daimler Stahlradwagen
- ↑ Patent DE73515C: Wagen-Lenkvorrichtung mit tangential zu den Rädern zu stellenden Lenkkreisen. Angemeldet am 28. Februar 1893, veröffentlicht am 14. März 1894, Anmelder: Benz & Cie.
- ↑ Patent Nr. 73515: „Wagenlenkvorrichtung mit tangential zu den Rädern zu stellenden Lenkkreisen“
- ↑ Benz Victoria mit Achsschenkellenkung
- ↑ Richtlinie 70/311/EWG des Rates vom 8. Juni 1970 zur Angleichung der Rechtsvorschriften der Mitgliedstaaten über die Lenkanlagen von Kraftfahrzeugen und Kraftfahrzeuganhängern, auf eur-lex.europa.eu
- ↑ Richtlinie 75/321/EWG des Rates vom 20. Mai 1975 zur Angleichung der Rechtsvorschriften der Mitgliedstaaten über die Lenkanlage von land- oder forstwirtschaftlichen Zugmaschinen auf Rädern, auf eur-lex.europa.eu
- ↑ Lenkungsarten der Lastenräder – Zweispurige Transporträder. e-lastenrad.de. Abgerufen am 23. September 2023.
- ↑ a b Patent US1715246A: Frame for motor cycles and like vehicles. Angemeldet am 21. Mai 1928, veröffentlicht am 28. Mai 1929, Erfinder: Frederick John Osborn, Norman Frederick Wood.
- ↑ Bird, Montagu of Beaulieu: Steam Cars, 1770–1970(1971), S. 52.
- ↑ Olaf v. Fersen (Hrsg.): Ein Jahrhundert Automobiltechnik – Nutzfahrzeuge. Springer-Verlag, 1987, ISBN 3-662-01120-4, S. 165.
- ↑ Ein Jahrhundert Automobiltechnik – Personenwagen. VDI Verlag, 1986, ISBN 3-18-400620-4, S. 368.
- ↑ Hinweise und Aufzeichnungen der Royal Society of London © 2002 The Royal Society
- ↑ Drehschemellenkung, Achsschenkellenkung. In: hako-lehrmittel.de. Hako Lehrmittel, archiviert vom (nicht mehr online verfügbar) am 27. November 2018; abgerufen am 6. April 2020 (bildlicher Vergleich der beiden Bauarten).
- ↑ Dieter Schramm, Benjamin Hesse, Niko Maas, Michael Unterreiner: Fahrzeugtechnik: Technische Grundlagen aktueller und zukünftiger Kraftfahrzeuge. DE GRUYTER OLDENBOURG, 2017, ISBN 978-3-486-85514-2, S. 122–124 (eingeschränkte Vorschau in der Google-Buchsuche).
- ↑ Konrad Reif, Karl-Heinz Dietschke: Kraftfahrtechnisches Taschenbuch. 27. Auflage. Vieweg & Sohn, 2011, ISBN 978-3-8348-1440-1, S. 318.
- ↑ a b Achsvermessung. In: Kraftfahrzeugtechnik 8/1981, S. 255–256 und 10/1981, S. 317–321.
- ↑ J. Noble, M. Somerfield (motorsport-total.com); Übersetzung: J. Ziegengeist: Was wirklich hinter der Regeländerung zu asymmetrischen Bremsen steckt. In: formel1.de. 23. August 2024, abgerufen am 23. August 2024.
- ↑ Velomondial 2000, Amsterdam, NL, Radverkehrskonferenz. Dicyclet ist zentrales Ausstellungsobjekt auf der Tagungsbühne.
Auf dieser Seite verwendete Medien

Autor/Urheber: Vitaly V. Kuzmin, Lizenz: CC BY-SA 4.0
RT-2PM2 Topol-M TEL with presumably Yars system transport-launch container during the first rehearsal for the Victory Day Parade at the training ground in Alabino.
Autor/Urheber: Manic-nirvana, Lizenz: CC BY-SA 3.0
Boeing 737's port wing with flaps partially retracted after take-off
Autor/Urheber:
- File:Ackermann.svg: User:Bromskloss
- derivative work: Hietzinger Friedhof
Illustration of Ackermann steering geometry
_Facelift_front_20100515.jpg)
Autor/Urheber: M 93, Lizenz: Attribution
VW Caravelle TDI (T5) Facelift


(c) S.Wetzel, CC BY-SA 4.0
Lenkung, schematisch , mit 2 Spurstangwen und einer Zwischenstange

Autor/Urheber: Mehlauge, Lizenz: CC BY-SA 3.0
Drehschemel eines Pferdewagens in Quetzin (Plau am See)

Autor/Urheber: SmileOne, Lizenz: CC BY 3.0
Vorderrad-Hinterradlenkung
(c) Paul Anderson, CC BY-SA 2.0
Blade Delivery to Turbine No 11. The rear steersman manoeuvres the blade carrying trailer into position
for unloading at the base of Turbine Tower No 11. 787682 787699 696211 633643 777641 687214
Turbine details: Tower Height: 60m Blade Length: 40m Total Max Height: 100m Manufacturer: Nordex
Model: N80

Autor/Urheber: http://www.rheinmetall-defence.com/en/rheinmetall_defence/index.php, Lizenz: CC BY-SA 4.0
TPz FUCHS 2

Autor/Urheber: Jean Housen, Lizenz: CC BY-SA 4.0
Vue de la Foire agricole de Libramont, dans le Luxembourg belge (82e édition en 2016).

Autor/Urheber: Norbert Schnitzler, Lizenz: CC BY-SA 3.0
Kompaktlader Bobcat 463 (Nutzlast 329 kg, Kipplast 660 kg, Kubota Dieselmotor 16,8 kW und 58,3 Nm) und 753 (650 kg Nutzlast, weitere Daten nicht gefunden)

Autor/Urheber: Mailtosap, Lizenz: CC BY-SA 4.0
Seitenansicht Teleskopstapler der Fa. Kramer

Autor/Urheber: LaurensvanLieshout, Lizenz: CC BY-SA 3.0
Lenksystem: 1. Lenkrad; 2 Lenkstange; 3 Lenkgetriebe; 4 Spurstange; 5 Radaufhängung
Der Nachlaufwinkel

Autor/Urheber: Крочак Ігор Якович, Lizenz: CC BY-SA 4.0
“Схід та Захід єдині”. Розвантаження.
Autor/Urheber: Aconcagua, Lizenz: CC BY-SA 3.0
BAUMA 2007, Radlader, Volvo
.jpg)
(c) Mattho, CC BY 3.0
Schematic drawing of a telescopic handler showing crab steering mode


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}