
Krummlinige,
affine und
Kartesische Koordinaten
Krummlinige Koordinaten sind Koordinatensysteme auf dem euklidischen Raum , bei denen die Koordinatenlinien gekrümmt sein können und die diffeomorph zu kartesischen Koordinaten sind.[1] Das heißt, die Transformation zwischen kartesischen Koordinaten und krummlinigen Koordinaten muss lokal invertierbar sein, wobei die Abbildung wie auch die Umkehrabbildung stetig differenzierbar sein müssen.
Die am häufigsten verwendeten krummlinigen Koordinatensysteme, die beide zu den orthogonalen Koordinatensystemen zählen, sind:
Je nach Problemstellung sind Berechnungen in krummlinigen Koordinatensystemen einfacher als in kartesischen durchzuführen. Zum Beispiel sind physikalische Systeme mit Radialsymmetrie oft einfacher in Kugelkoordinaten zu behandeln.
Folgende Ausführungen beziehen sich speziell auf den dreidimensionalen euklidischen Raum, vieles davon lässt sich jedoch auf den -dimensionalen Fall erweitern.
Transformation von kartesischen Koordinaten
Koordinaten eines Punktes im -dimensionalen Raum sind ein Tupel aus reellen Zahlen, die bezüglich eines speziellen Koordinatensystems bestimmt werden. Im Folgenden werden für einen Punkt die Koordinaten in zwei verschiedenen Koordinatensystemen betrachtet.
Die kartesischen Koordinaten lassen sich als stetig differenzierbare Funktionen neuer Koordinaten schreiben (direkte Transformation):
- , , …
Dies stellt ein Gleichungssystem dar, das invertierbar (also nach den auflösbar) ist (inverse Transformation)
- , , …
wenn die inverse Funktionaldeterminante ungleich null oder unendlich ist:
- .
Die inverse Transformation muss ebenso wie die direkte Transformation stetig differenzierbar sein.
Für die Punkte, in denen die Transformation umkehrbar eindeutig ist, heißt die Transformation regulär, sonst singulär. Dann gilt: Ist ein Punkt mit den kartesischen Koordinaten gegeben, so können mit Hilfe der inversen Transformation eindeutig die Koordinaten , die krummlinigen Koordinaten von , berechnet werden. Jeder reguläre Punkt des Raums kann eindeutig sowohl durch die als auch äquivalent durch die beschrieben werden.
Ein Satz von Transformationsgleichungen mit den oben beschriebenen Eigenschaften zusammen mit einem kartesischen Koordinatensystem definiert ein krummliniges Koordinatensystem.
Koordinatenflächen, -linien und -achsen

hier q
i statt u
i: Koordinatenflächen, Koordinatenlinien und Koordinatenachsen (entlang der Basisvektoren eines ausgewählten Ortes)
Die Begriffe Koordinatenflächen, -linien und -achsen werden im Folgenden anhand des dreidimensionalen Raums anschaulich erläutert.
Koordinatenflächen erhält man, indem jeweils eine Koordinate festgehalten () und die beiden anderen variiert werden.
- mit
Durch jeden nicht-singulären Punkt geht genau eine Fläche jeder Flächenschar .
Koordinatenlinien erhält man, indem jeweils zwei Koordinaten festgehalten ( mit ) und die dritte variiert wird, d. h. als Schnittmenge zweier Koordinatenflächen für unterschiedliche Koordinaten.
- mit
Obige Bedingung für die Funktionaldeterminante bedeutet, dass in jedem Punkt des 3-dimensionalen Raumes sich nur 3 Koordinatenlinien schneiden dürfen, da sonst dieser Punkt keine eindeutigen Koordinaten besitzt (Funktionaldeterminante gleich null).
Als Beispiel für eine Uneindeutigkeit zählt die -Achse bei Kugelkoordinaten, an der sich alle Ebenen ( ist der Azimutwinkel) schneiden; somit sind die Koordinaten von Punkten auf der -Achse nicht eindeutig (, aber beliebig). Solche Punkte heißen singuläre Punkte der Transformation.
Schneiden sich die Koordinatenlinien unter rechten Winkeln, so heißt das Koordinatensystem orthogonal.
Die Koordinatenachsen sind als Tangenten an die Koordinatenlinien definiert. Da die Koordinatenlinien im Allgemeinen gekrümmt sind, sind die Koordinatenachsen nicht räumlich fest, wie es für kartesische Koordinaten gilt. Dies führt auf das Konzept der lokalen Basisvektoren, deren Richtung vom betrachteten Raumpunkt abhängt – im Gegensatz zu globalen Basisvektoren der kartesischen oder affinen Koordinaten.
Verschiedene Basen
Um einen Vektor mittels Koordinaten darstellen zu können, ist eine Basis nötig. Im -dimensionalen Raum besteht diese aus linear unabhängigen Vektoren, den Basisvektoren. Jeder beliebige Vektor kann als Linearkombination der Basisvektoren dargestellt werden, wobei die Koeffizienten der Linearkombination die Komponenten des Vektors genannt werden.
Für echt krummlinige (also nicht-geradlinige) Koordinaten variieren Basisvektoren und Komponenten von Punkt zu Punkt, weshalb die Basis als lokale Basis bezeichnet wird. Die Ortsabhängigkeit eines Vektorfeldes verteilt sich auf die Koordinaten sowie auf die Basisvektoren. Im Gegensatz dazu zeichnen sich globale Basen dadurch aus, dass die Basisvektoren in jedem Punkt identisch sind, was nur für lineare bzw. affine Koordinaten (die Koordinatenlinien sind geradlinig, aber im Allgemeinen schiefwinklig) möglich ist. Die Ortsabhängigkeit eines Vektorfeldes steckt bei geradlinigen Koordinatensystemen allein in den Koordinaten.
Um Basisvektoren mit einem Koordinatensystem zu verknüpfen gibt es zwei gebräuchliche Methoden:
- kovariante Basisvektoren: Tangential an die Koordinatenlinien, d. h. kollinear zu den Koordinatenachsen
- kontravariante Basisvektoren: Normal zu den Koordinatenflächen
Die beiden Klassen von Basisvektoren sind dual bzw. reziprok zueinander. Diese beiden Basen bezeichnet man als holonome Basen. Sie unterscheiden sich in ihrem Transformationsverhalten unter Koordinatenwechsel. Dabei sind die Transformationen invers zueinander.
An jedem Punkt der betrachteten Mannigfaltigkeit existieren gleichzeitig beide Basen. Somit kann ein beliebiger Vektor als Linearkombination entweder der kovarianten Basisvektoren oder der kontravarianten Basisvektoren dargestellt werden. Dabei werden stets kontravariante Koordinaten mit kovarianten Basisvektoren kombiniert und kovariante Koordinaten mit kontravarianten Basisvektoren .
Diese kreuzweise Paarung (kontra-ko bzw. ko-kontra) sorgt dafür, dass der Vektor unter Koordinatentransformation invariant ist, da die Transformationen von Koordinaten und Basisvektoren invers zueinander sind und sich gegenseitig aufheben. Diese Eigenschaft ist für den Begriff eines Vektors in der Physik essentiell: In der Physik müssen Gesetzmäßigkeiten unabhängig vom speziellen Koordinatensystem gelten. Aus physikalischer Sicht muss ein Vektor, der z. B. die Geschwindigkeit eines Teilchens beschreibt, unabhängig vom gewählten Koordinatensystem sein.
Man spricht von einem kontravarianten Vektor (besser: kontravarianter Koordinatenvektor), wenn die Koordinaten kontravariant und die Basisvektoren kovariant sind. Analog spricht man von einem kovarianten Vektor, wenn die Koordinaten kovariant und die Basisvektoren kontravariant sind.
Kovariante Basis
Die kovarianten Basisvektoren schmiegen sich in jedem Punkt tangential an die Koordinatenlinien an.
Normierte und natürliche Basisvektoren
Die Tangenteneinheitsvektoren an die Koordinatenlinien bilden eine Basis, bestehend aus kovarianten Basisvektoren:
Diese Einheitsvektoren haben im Allgemeinen eine vom Ort abhängige Richtung .
Man definiert die Maßstabsfaktoren durch
- , somit
Die unnormierten Vektoren bilden die natürliche Basis, aus der man durch Normierung die unitäre Basis erhält (Einheitsvektoren). Die Vektoren der natürlichen Basis werden hier mit bezeichnet, die Vektoren der normierten Basis durch .
Kontravariante Komponenten: Vektoren als Linearkombination der kovarianten Basisvektoren
Mit der neuen Basis lassen sich nun alle Vektoren durch die Basisvektoren der kovarianten Basis (normiert) bzw. (unnormiert = natürliche Basisvektoren) ausdrücken:
Dabei ist bzw. die (kontravariante) Vektorkomponente, die in Richtung der -Koordinatenlinie zeigt, bezüglich der normierten Basis und bezüglich der natürlichen Basis. In der Tensoranalysis wird mit hochgestelltem Index geschrieben.
Die Länge einer Vektorkomponente entspricht im Fall der normierten Basis dem Betrag der Koordinate , im Fall der natürlichen Basis dem Produkt aus dem Betrag der Koordinate und der Länge des Basisvektors :
Beschreibt ein Vektor eine physikalische Größe, so steckt im unnormierten Fall nicht nur die Länge, sondern auch die physikalische Dimension teils in den Koordinaten und teils in den natürlichen Basisvektoren, was bei konkreten Rechnungen umständlich sein kann. Bei normierter Basis hingegen ist die physikalische Dimension rein auf die Koordinate beschränkt. Die Koordinaten heißen deshalb physikalische Koordinaten und die normierten Basisvektoren heißen auch physikalische Basisvektoren.
Zur Abgrenzung heißen die Koordinaten deshalb holonome Koordinaten und die natürlichen Basisvektoren heißen auch holonome Basisvektoren oder einfach kontravariante Koordinaten und kovariante Basisvektoren.
Transformationsverhalten von Basisvektoren und Koordinaten, Jacobi-Matrix
Aus der Definition der natürlichen Basisvektoren folgt für die Transformation von den Koordinaten nach die einfache Transformationsformel:
Die natürlichen Basisvektoren zeigen ein sehr einfaches Transformationsverhalten. Für die normierten Basisvektoren enthält die Transformationsformel zusätzliche Faktoren :
Ein beliebiger Vektor muss sowohl in den alten, wie auch den neuen Koordinaten darstellbar sein:
Somit erhält man das Transformationsverhalten der Koordinaten:
Während die Transformation der (kovarianten) Basisvektoren mittels der Jacobi-Matrix durchzuführen ist, muss bei der Transformation der (kontravarianten) Koordinaten die inverse Jacobi-Matrix angewandt werden.
In der Tensoranalysis definiert man einen Vektor über obiges Transformationsverhalten. Insofern ist der Ortsvektor selbst kein Vektor, das Ortsvektordifferential aber schon.
Die Jacobi-Matrix der Koordinatentransformation von kartesischen in krummlinige Koordinaten ist identisch mit der Matrix, die von den natürlichen Basisvektoren als Spalten gebildet wird:
Die Bedingung für die inverse Funktionaldeterminante lässt sich anhand folgender Beziehung erklären:
Dies entspricht einer inhomogenen linearen Gleichung für den Vektor . D. h. die Unbekannten sind die Basisvektoren der krummlinigen Koordinaten . Das Gleichungssystem ist nur dann eindeutig lösbar, wenn der Kern der Matrix nulldimensional ist bzw. die Zeilen- oder Spaltenvektoren linear unabhängig sind. Dies ist dazu äquivalent, dass die Determinante ungleich Null ist. Dann sind die Unbekannten eindeutig bestimmt, d. h. an jedem Punkt existiert genau eine definierte Basis .
Analog entspricht die duale Basis einer Matrix, die genau das Inverse der obigen Matrix ist.
Metrischer Tensor und Gramsche Determinante
Die Skalarprodukte zwischen den natürlichen Basisvektoren definieren die Komponenten des metrischen Tensors bzw. Fundamentaltensors :
Man beachte, dass der metrische Tensor wegen der Kommutativität des Skalarprodukts symmetrisch ist:
Wegen dieser Symmetrie hat der metrische Tensor unabhängige Elemente (statt ), im Dreidimensionalen also 6 Koeffizienten.
Der metrische Tensor lässt sich als Produkt der Jacobi-Matrix und ihrer Transponierten schreiben:
Die Größen nennt man Metrik- bzw. Maßkoeffizienten, da diese benötigt werden, um die Länge eines Vektors aus den kontravarianten Koordinaten zu berechnen. Hierzu sind die Maßstabsfaktoren nötig.
Die Maßstabsfaktoren sind durch die Diagonalelemente gegeben, da gilt:
Die Determinante des metrischen Tensors wird Gramsche Determinante genannt:
Aus folgt, dass der Betrag der Determinante der Jacobi-Matrix (also der Funktionaldeterminante) gleich der Wurzel der Gramschen Determinante sein muss. Oder anders geschrieben, dass
- ,
wobei das Vorzeichen von der Orientierung der Basis abhängt. Die Determinante aus den normierten Basisvektoren ergibt (aufgrund der Multilinearität von Determinanten):
Für die Inverse des metrischen Tensors gilt nach der Cramerschen Regel
wobei die Adjunkte (die Transponierte der Kofaktormatrix, deren Einträge die vorzeichenbehafteten Unterdeterminanten sind) und die Gramsche Determinante bezeichnet. Aus dem Laplace'schen Entwicklungssatz folgt
folgt für den inversen metrischen Tensor:
Spezialfall: Orthogonale Koordinaten
Schneiden sich im -dimensionalen Raum an jedem Raumpunkt die Koordinatenlinien paarweise senkrecht, so spricht man von einem orthogonalen Koordinatensystem. Die Einheitsvektoren bilden also eine orthonormale Basis des :
- , (Kronecker-Delta)
Für die natürlichen Basisvektoren gilt:
Somit ist für orthogonale Basisvektoren der metrische Tensor diagonal.
Der inverse metrische Tensor ist für orthogonale Koordinaten gleich:
Die Gramsche Determinante vereinfacht sich für orthogonale Koordinaten zu:
Für die Determinanten aus natürlichen bzw. normierten Basisvektoren gilt hier:
Spezialfall: Orthogonale Koordinaten in 3 Dimensionen
Bilden die orthonormalen Basisvektoren eine rechtshändige Basis (positive Orientierung), gelten folgende Beziehungen:
- , (: Levi-Civita-Symbol)
Ausgeschrieben:
Spezialfall: Geradlinige Koordinatensysteme
Für allgemeine krummlinige Koordinaten sind die Koordinatenlinien gekrümmt und die Basisvektoren variieren von Punkt zu Punkt. Beim Spezialfall der geradlinigen, aber durchaus schiefwinkligen, Koordinatensystemen sind die Koordinatenlinien gerade und die Basisvektoren somit ortsunabhängig. Die Koordinatenflächen sind Ebenen, eine Schar von Koordinatenflächen bilden parallele Ebenen.
Die Transformationsgleichungen lassen sich in diesem Fall schreiben als:
wobei die und konstant sind. Die Jacobi-Matrix entspricht dabei der Transformationsmatrix . Somit entsprechen die natürlichen Einheitsvektoren der -ten Spalte der Matrix .
Beispiel für geradlinige, schiefwinklige Koordinatensysteme
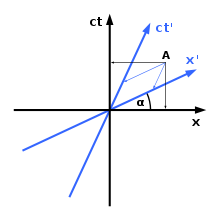
Minkowski-Diagramm mit
,
.
Als Beispiel eines geradlinigen, schiefwinkligen Koordinatensystems wird ein Minkowski-Diagramm mit zwei Bezugssystemen betrachtet, die sich gleichförmig zueinander mit der Geschwindigkeit bewegen. Über hängen die Größen relative Geschwindigkeit , Rapidität und Winkel mit den Wertebereichen mit und sowie zusammen. Die Lorentz-Transformation transformiert die Bezugssysteme ineinander :
Da die Koordinatentransformation linear ist, gilt: . Die natürlichen Basisvektoren in Richtung lauten in kartesischen Koordinaten:
Interpretiert man das Minkowski-Diagramm euklidisch (Verwendung des Standardskalarprodukts und nicht des Minkowski-Skalarprodukts) erhält man den metrischen Tensor
und die Gramsche Determinante
Da für Nebendiagonalelemente auftreten, bilden die Koordinatenlinien keinen rechten Winkel:
Da für die Diagonalelemente ungleich Eins sind, sind die natürlichen Basisvektoren keine Einheitsvektoren, d. h. der Maßstab auf den gekippten Koordinatenlinien ist gestreckt:
- .
Nebenbemerkung: Mit dem Skalarprodukt der speziellen Relativitätstheorie , wobei die nichteuklidische Minkowski-Metrik ist, erhält man die Invarianz des Skalarprodukts unter Lorentz-Boosts.
Duale Basis: Kontravariante Basis
Die kontravarianten Basisvektoren stehen an jedem Punkt senkrecht auf den Koordinatenflächen. Sie sind dual zu den kovarianten Basisvektoren. Die kontravarianten Komponenten eines Vektors lassen sich durch Projektion auf kontravariante Basisvektoren erhalten.
Komponenten als Projektion auf Basisvektoren: Orthogonale Koordinaten
Die Vektorkomponente (kontravariante Komponente) des Vektors lässt sich für eine orthonormale Basis () einfach durch folgende Projektion bestimmen:
Bei nicht orthogonalen Koordinatensystemen (schiefwinklig) erhält man durch die Projektion eines Vektors auf einen kovarianten Basisvektor die kovariante Komponente (kovariante Komponente – in der Tensoranalysis mit tiefgestelltem Index geschrieben ) und nicht die kontravariante Komponente , da hier die Relation nicht gilt, bzw. der metrische Tensor nicht diagonal ist. Hierzu benötigt man das Konzept des Dualraums und der dualen Basis.
Einführung Dualraum und duale Basis
Der Dualraum zum Vektorraum der Tangentialvektoren wird gebildet aus den linearen Funktionalen (auch 1-Formen), die Vektoren in den darunterliegenden Körper abbilden: . Eine Basis des Dualraums sind die dualen Basisvektoren zu . Diese sind so definiert, dass gilt.
Weiterhin definiert man folgende Bilinearform, die sog. duale Paarung: . Damit lässt sich die Wirkung dualer Basisvektoren auf Basisvektoren schreiben als:
Für endlichdimensionale ist isomorph zu , also . In euklidischen Räumen (dem mit dem Standardskalarprodukt) lässt sich die duale Paarung mit dem Skalarprodukt
identifizieren und somit duale Vektoren ebenfalls als Vektoren darstellen (hier gilt: und sowie ).
Duale Basis
Die duale Basis ist also so definiert, dass für das Skalarprodukt aus Basisvektoren (kovariante Basisvektoren) und dualen Basisvektoren (kontravariante Basisvektoren) gilt (hier für die normierten Basisvektoren ):
- .
Bzw. analog für die natürlichen Basisvektoren und deren duale Basisvektoren :
- .
Für die natürlichen Basisvektoren und deren duale Basisvektoren gilt in Matrixnotation:
Da die Matrix mit den kovarianten Basisvektoren als Spaltenvektoren der Jacobi-Matrix entspricht , muss folglich die Matrix mit den kontravarianten Basisvektoren als Zeilenvektoren der inversen Jacobi-Matrix entsprechen:
Um die dualen Basisvektoren zu erhalten, muss somit die Inverse der Jacobi-Matrix bestimmt werden.
Die Gramsche Determinante der kontravarianten Basisvektoren muss dem Inversen der Determinante der kovarianten Basisvektoren entsprechen:
Kovariante Komponenten: Vektoren als Linearkombination der kontravarianten Basisvektoren
Mit der neuen Basis lassen sich nun alle Vektoren durch die Basisvektoren der kontravarianten Basis (normiert) bzw. (unnormiert = natürliche Basisvektoren) ausdrücken:
Dabei ist bzw. die (kovariante) Vektorkomponente, die in Richtung der Normale der -Koordinatenfläche zeigt. In der Tensoranalysis wird mit tiefgestelltem Index geschrieben.
Komponenten als Projektion auf Basisvektoren: Allgemein krummlinige Koordinaten
Die kontravariante Komponente eines Vektors erhält man durch Projektion auf den dualen Basisvektor (kontravariante Basis – in der Tensoranalysis mit hochgestelltem Index geschrieben ).
Bei orthonormalen Basisvektoren stimmen ko- und kontravariante Basisvektoren überein und ebenso ko- und kontravariante Komponenten eines Vektors.
Allgemein lässt sich ein beliebiger Vektor über kontra- oder kovariante Basisvektoren darstellen:
Somit werden kontravariante Komponenten mit kovarianten Basisvektoren oder kovariante Komponenten mit kontravarianten Basisvektoren kombiniert. Diese Eigenschaft führt auf die Invarianz der Vektoren unter einem Wechsel des Koordinatensystems.
Multiplikation auf beiden Seiten mit liefert
Somit lassen sich mit Hilfe des metrischen Tensors und seiner Inversen kontravariante Komponenten in kovariante und umgekehrt überführen (in Tensorsprache: Heben und Senken von Indizes).
Duale Basis und Komponenten für orthogonale Koordinaten
Bei orthogonalen Koordinaten stimmen in der normierten Form Basisvektoren und duale Basisvektoren überein. Für die natürliche Basis bedeutet dies, dass zwei zueinander duale Basisvektoren kollinear sind, d. h. der eine ist ein Vielfaches (Faktor ) des anderen:
Somit stimmen die Komponenten bzgl. der normierten Basis ebenfalls überein:
Duale Basis in 3 Dimensionen
Die dualen Basisvektoren lassen sich im dreidimensionalen über Kreuzprodukte der Basisvektoren geteilt durch deren Spatprodukt bzw. ausdrücken:
In kompakter Notation für die normierten Basisvektoren
bzw. für die natürlichen Basisvektoren:
Während die (kovarianten) Basisvektoren tangential an die Koordinatenlinien sind, stehen die dualen (kontravarianten) Basisvektoren senkrecht auf den Koordinatenflächen. Beispiel: Während die Vektoren und in der Koordinatenfläche liegen, steht senkrecht auf dieser.
Umgekehrt lassen sich die kontravarianten Basisvektoren im dreidimensionalen über Kreuzprodukte der kovarianten Basisvektoren geteilt durch deren Spatprodukt bzw. ausdrücken:
Bilden die kovarianten Basisvektoren ein Rechtssystem (Funktionaldeterminante positiv), dann bilden auch die kontravarianten Basisvektoren ein Rechtssystem (inverse Funktionaldeterminante positiv). Das Produkt aus den beiden Determinanten muss nämlich Eins ergeben.
Beispiel für geradlinige, schiefwinklige Koordinatensysteme

Minkowski-Diagramm für
und
mit Basis- und dualen Basisvektoren.
Als Beispiel eines geradlinigen, schiefwinkligen Koordinatensystems dient, als Fortsetzung des obigen Beispiels, ein Minkowski-Diagramm. Die Lorentz-Transformation war gegeben durch , somit lautet die inverse Transformation: :
Da die Koordinatentransformation linear ist, gilt: . Somit lauten die dualen Einheitsvektoren in kartesischen Koordinaten:
Diese erfüllen die Dualitätsbedingungen: Orthogonalität für und sowie Normierung für und .
Tensoren
Tensoren -ter Stufe lassen sich allgemein als -faches Tensorprodukt von Vektoren darstellen:
Das tensorielle Produkt von Vektoren ist nicht kommutativ, sodass die Reihenfolge der (Basis-)Vektoren nicht vertauscht werden darf.
Dabei sind Skalare (Funktionen der Koordinaten in den Grundkörper, also , die unter Koordinatentransformation ihren Funktionswert an jedem Punkt nicht ändern ) Tensoren nullter Stufe und Vektoren sind Tensoren erster Stufe.
Da sich Vektoren auf zwei verschiedene Arten, nämlich kovariant bzw. kontravariant, darstellen lassen, gibt es für einen Tensor -ter Stufe Darstellungsmöglichkeiten. Durch die Darstellung mittels Vektoren werden die Eigenschaften des Vektors auf Tensoren vererbt. So lassen sich z. B. mit Hilfe des metrischen Tensors Indizes heben und senken, d. h. ko- in kontravariante Komponenten bzw. umgekehrt überführen. Tensoren, die sich durch Heben und Senken (also innere Produkte mit dem metrischen Tensor) ergeben, heißen assoziierte Tensoren. Ebenso wird das Transformationsverhalten von Vektoren für Tensoren übernommen, d. h. kovariante Anteile eines Tensors transformieren sich wie kovariante Vektoren, also mittels der Jacobi-Matrix, und kontravariante Anteile mit der inversen Jacobi-Matrix, wie bei kontravarianten Vektoren.
Tensoren zweiter Stufe
Ein Tensor zweiter Stufe kann auf vier verschiedenen Arten dargestellt werden:
Die vier Fälle sind: (rein) kontravariant, (rein) kovariant, gemischt kontra-kovariant, gemischt ko-kontravariant.
Der Einheitstensor, definiert durch , ist gegeben durch:
Skalarprodukt zweier Vektoren
Das Skalarprodukt zweier Vektoren in krummlinigen Koordinaten ist gegeben durch:
Dies entspricht der Kontraktion des Tensors zweiter Stufe zu einem Tensor nullter Stufe.
Tensoren dritter Stufe
Ein Tensor dritter Stufe kann auf acht verschiedene Arten dargestellt werden:
Im Dreidimensionalen ist der total antisymmetrische Tensor gegeben durch:
Dabei ist die erste Relation die kartesische Schreibweise, die folgenden zwei aus acht Schreibweisen der krummlinigen Version des Tensors.
Ableitungen der Basisvektoren
Die Ableitungen von Vektoren, die in krummlinigen Koordinaten dargestellt werden, weisen gegenüber den kartesischen folgende Besonderheit auf. Da die Koordinatenlinien im Allgemeinen keine Geraden sind und daher die Basisvektoren eine vom Ort abhängige Richtung haben, müssen die Basisvektoren auch differenziert werden (Anwenden der Produktregel):
Bzw. bzgl. der natürlichen Basis
Christoffel-Symbole
Die Ableitung der Basisvektoren nach einer Koordinate lässt sich als Linearkombination aller Basisvektoren schreiben.
Die Koeffizienten heißen Christoffel-Symbole zweiter Art.
Die Größen heißen Christoffel-Symbole erster Art. Das vollständige Differential eines natürlichen Basisvektors lautet:
Die Christoffel-Symbole werden nun für die Ableitung eines Vektors verwendet (beim zweiten Gleichheitszeichen werden die Indizes und vertauscht, was möglich ist, da über beide summiert wird, und ausgeklammert):
Kovariante Ableitung
Darauf basierend definiert man die kovariante Ableitung (ein ausgezeichneter Zusammenhang auf einem Tensorbündel, einem besonderen Vektorbündel) eines Vektors durch:
Der erste Term beschreibt die Änderung der Vektorkomponenten des Feldes entlang der Koordinatenachse , der zweite die Änderung des Feldes, die durch die Änderung des Koordinatensystems zustande kommt. In geradlinigen Koordinatensystemen (hier ist der metrische Tensor konstant) verschwinden die Christoffel-Symbole und die kovariante Ableitung ist identisch mit der partiellen Ableitung.
Die kovariante Ableitung führt eine zusätzliche geometrische Struktur auf einer Mannigfaltigkeit ein, die es erlaubt Vektoren aus unterschiedlichen Vektorräumen und zwar aus benachbarten Tangentialräumen zu vergleichen. Somit stellt die kovariante Ableitung einen Zusammenhang zwischen verschiedenen Vektorräumen her. Dieser ist z. B. nötig, um für eine Kurve die Krümmung berechnen zu können – dazu ist der Differentialquotient aus den Vektoren und zu bilden, die in unterschiedlichen Vektorräumen leben.
Die kovariante Ableitung der Koordinaten eines Tensors -ter Stufe ergibt die Koordinaten eines Tensors der Stufe , da ein kovarianter Index hinzukommt. Für Tensoren der Stufe gilt: Die partielle Ableitung einer Tensorkoordinate nach krummlinigen Koordinaten ist, im Gegensatz zur kovarianten Ableitung, keine Tensorkoordinate.
Die kovariante Ableitung der Koordinaten des metrischen Tensors verschwinden: .
Mit der kovarianten Ableitung lässt sich die Richtungsableitung verallgemeinern:
Beispiel: Die Geodäte auf einer riemannschen Mannigfaltigkeit, die kürzeste Verbindungskurve zwischen zwei Punkten, lässt sich durch die geodätische Differentialgleichung ausdrücken. Diese Gleichung bedeutet, dass das Geschwindigkeitsvektorfeld (bzw. Tangentenvektorfeld) der Kurve längs der Kurve (also parallel zu ) konstant ist. Dieser Definition liegt die Überlegung zu Grunde, dass die Geodäten des gerade Linien sind. Die Krümmung der Kurve muss also verschwinden und somit die Richtungsableitung der Tangentenvektoren entlang der Kurve null sein. In lokalen Koordinaten ausgedrückt lautet die geodätische Differentialgleichung:
Es existieren grundsätzlich zwei Möglichkeiten, die Christoffelsymbole, also die Koeffizienten des affinen Zusammenhangs , festzulegen: Entweder man gibt die Koeffizienten vor, d. h. man gibt vor, wie sich die Koordinatensysteme von Punkt zu Punkt auf der Mannigfaltigkeit ändern, oder man hat mehr Informationen über den betrachten Raum als nur, dass es sich um eine differenzierbare Mannigfaltigkeit handelt (z. B. einen Abstandsbegriff) und weiß dadurch, was man unter der kovarianten Ableitung zu verstehen hat, wodurch die Christoffelsymbole ebenfalls festgelegt werden. Hier ist letzterer Fall realisiert, da die hier betrachteten Mannigfaltigkeiten riemannsche Mannigfaltigkeiten sind und somit für jeden Tangentialraum der Mannigfaltigkeit ein Skalarprodukt und dadurch induziert eine Metrik, also ein Abstandsbegriff, existiert.
Da die betrachteten Mannigfaltigkeiten (semi-) riemannsche Mannigfaltigkeit sind (hier verschwindet der Torsionstensor), ist der Zusammenhang ein sog. Levi-Civita-Zusammenhang, d. h. er ist torsionsfrei bzw. symmetrisch und außerdem ein metrischer Zusammenhang. Da hier der Zusammenhang torsionsfrei ist, entspricht die antisymmetrisierte Richtungsableitung genau der Lie-Ableitung . Während die Richtungsableitung linear im Richtungsfeld ist (die Richtungsableitung hängt vom Richtungsfeld an nur einem Punkt ab), ist die Lie-Ableitung in keinem Argument linear (für die Lie-Ableitung müssen beide Vektorfelder in einer offenen Umgebung bekannt sein).
Eigenschaften der Christoffel-Symbole
Aus dem Satz von Schwarz (bzw. aus der Torsionsfreiheit des Zusammenhangs ) folgt, dass die Christoffel-Symbole in den unteren beiden Indizes symmetrisch sind:
Daher lassen sich die Christoffel-Symbole durch Ableiten der metrischen Koeffizienten bestimmen:
Dies folgt aus folgender Relation
und zwei Permutationen von , nämlich und .
Für die Ableitung der dualen Basisvektoren erhält man folgenden Zusammenhang mit dem negativen Christoffel-Symbol:
Damit folgt die kovariante Ableitung von kovarianten Komponenten:
Es ist wichtig anzumerken, dass die Christoffel-Symbole mit ihren drei Indizes keinen Tensor dritter Stufe beschreiben, da sie nicht das geforderte Transformationsverhalten für Tensoren zeigen.
Das Auftreten des zweiten Summanden in der Transformationsformel zeigt, dass es sich nicht um einen Tensor handelt. Deswegen werden die Christoffel-Symbole in der Literatur manchmal mit Symbolen notiert, die nicht mit Tensoren verwechselt werden können:
Die Aussage zum Transformationsverhalten lässt sich verallgemeinern: Der Index () einer partiellen Ableitung eines Tensors transformiert sich wie ein kovarianter Index (). Dagegen transformieren sich die beiden Indizes () einer zweiten partiellen Ableitung nicht wie Tensorindizes. Als Ausweg steht die kovariante Ableitung zur Verfügung: Die Indizes einer -te kovarianten Ableitung einer Tensorkoordinate sind wieder Tensorkoordinaten, sie transformieren sich wie kovariante Indizes. Z.B. sind in die Indizes und kovariante Indizes.
Weitere Eigenschaften krummliniger Koordinaten in 3 Dimensionen
Vektorprodukt und alternierender Tensor
In kartesischen Koordinaten lautet das Kreuz- oder Vektorprodukt mit dem Levi-Civita-Symbol
In krummlinigen Koordinaten ist dies unter Verwendung des alternierenden Tensors
zu ersetzen durch:
Dies lässt sich mit ableiten:
An folgender Rechnung sieht man, dass das korrekte Transformationsverhalten eines Tensors hat (hier die kovariante Version des Tensors):
Bezüglich der normierten Basis lautet das Vektorprodukt:
Koordinatenfläche: Innere Geometrie
Wir betrachten ohne Beschränkung der Allgemeinheit die Fläche . Ein (unnormierter) Normalenvektor der Fläche ist kollinear zum kontravarianten Basisvektor :
Man definiert für eine Fläche im konventionsgemäß die folgenden Größen der „inneren Geometrie“, die sich durch Längen- und Winkelmessungen innerhalb der Fläche ermitteln lassen (siehe Erste Fundamentalform):
Für orthogonale Koordinaten ist .
Der Metrische Tensor der Fläche und deren Gramsche Determinante ist
Die Funktionaldeterminante der Fläche lautet, wobei der normierte Normalenvektor der Fläche ist:
Der inverse metrische Tensor der Fläche lautet:
Koordinatenfläche: Äußere Geometrie
Griechische Indizes laufen im Folgenden über den Bereich 1,2 und kennzeichnen so Koordinaten und Basisvektoren in der Fläche.
Die partielle Ableitung des normierten Normalenvektors nach der Koordinate lässt sich als Linearkombination der Basisvektoren der Fläche darstellen. Dies folgt aus der Normierungsbedingung durch Ableiten . Somit ist orthogonal zur Flächennormale und muss folglich in der Fläche liegen. Man führt eine neue Größe ein, der ein Tensor zweiter Stufe ist:
Der Tensor wird in der Literatur teilweise Flächentensor zweiter Stufe, Krümmungstensor oder Haupttensor genannt. Die kovarianten Koordinaten lassen sich wie folgt berechnen, wobei gilt:
Dies lässt sich auch umschreiben zu (siehe zweite Fundamentalform):
Die lassen sich mit den Christoffel-Symbolen zweiter Art in Verbindung bringen. Es gelte im Folgenden :
Daraus folgen die Gauß-Weingarten-Gleichungen:
Die zweite Fundamentalform hängt von der Lage der Fläche im umgebenden Raum ab und wird für Krümmungsberechnungen benötigt. Mit Hilfe des gemischt kontravariant-kovarianten Tensors
werden die Hauptkrümmungen (Eigenwerte von ), die mittlere Krümmung und die Gaußsche Krümmung der Fläche definiert.
Der Riemannsche Krümmungstensor lässt sich durch das Tensorprodukt ausdrücken. Weitere Integrabilitätsbedingungen sind die Mainardi-Codazzi-Gleichungen .
Integrationselemente in 3 Dimensionen
Kurvenelement
Ein vektorielles Wegelement oder Kurvenelement kann als totales Differential des Ortsvektors dargestellt werden.
Die Differentiale in Richtung der -Koordinatenlinien können identifiziert werden:
Es ist zu beachten, dass der Index in kein kovarianter Index ist.
Mit Hilfe des vektoriellen Wegelements können nun Bogen-, Flächen- und Volumenelement bestimmt werden.
Bogenelement
Das skalare Wegelement oder Längenelement bzw. Bogenelement ist definiert über
Mit physikalischen (normierten) Basisvektoren gilt:
für orthogonale Koordinaten gilt:
Spezialfall: Verläuft die Kurve in der Ebene , dann gilt die erste Fundamentalform
Flächenelement
Das vektorielle Flächenelement einer Koordinatenfläche lautet
Das Vorzeichen hängt von der Orientierung des Flächenelements ab. Die Größe heißt skalares Flächenelement.
Wir betrachten ohne Beschränkung der Allgemeinheit die Fläche :
Mit physikalischen (normierten) Basisvektoren gilt:
Für orthogonale Koordinaten gilt:
Volumenelement
Das Volumenelement lautet, wobei sich der Betrag der Funktionaldeterminante identifizieren lässt:
Mit physikalischen (normierten) Basisvektoren gilt:
Für orthogonale Koordinaten gilt:
Differentialoperatoren in 3 Dimensionen
Spezialfall: Orthogonale Koordinatensysteme
Dieser Spezialfall ist aus verschiedenen Gründen besonders wichtig (z. B. für Physiker und Ingenieure), u. a. weil die gebräuchlichsten krummlinigen Koordinatensysteme (etwa sphärische und elliptische Koordinaten) dazugehören und weil erschwerende mathematische Begriffe, etwa kovariant und kontravariant bzw. der mit dem *-Symbol verbundene Begriff des Dualen bzw. die Γ-Koeffizienten hier entfallen. Ferner hat man es immer mit orthogonalen Basen (orthonormierte Einheitsvektoren) zu tun. (Die Basisvektoren sind nur orthogonal, aber nicht notwendig normiert. Erst das zugehörige Einheitsvektorsystem ist orthonormiert.)[2]
Es werden die Differentialoperatoren Gradient, Divergenz, Rotation und Laplace für orthogonale Koordinatensysteme angegeben[3]:
- Gradient einer skalaren Funktion (eigentlich einer Schachtelfunktion):
Beachte, dass nicht nur , sondern alle genannten Größen, auch die Basisvektoren und die h-Koeffizienten, von u abhängen können.
Man sollte hier also nicht einfach setzen, sondern die Definition benutzen. Die oben wiedergegebenen Ergebnisse erhält man in der Tat leichter auf anschaulichem Wege als aus der meist ziemlich umständlichen Rechnung, wenn man von den vorhandenen koordinatenunabhängigen Definitionen der benutzten Größen und ausgeht.
Konforme Abbildung
Nützliche orthogonale krummlinige Koordinaten in zwei Dimensionen werden unter anderem durch konforme Abbildungen erzeugt. Solche krummlinigen Koordinaten sind nicht nur orthogonal, sondern winkeltreu für beliebige Winkel. Das bedeutet u. a., dass die Längenverhältnisse zweier Basisvektoren, z. B. unabhängig von k den Wert 1 ergeben, sodass nicht etwa aus einer Sphäre ein Ellipsoid entsteht.
Allgemeine krummlinige Koordinatensysteme
Schließlich werden in allgemeinen krummlinigen Koordinatensystem die Differentialoperatoren angegeben.
Im Folgenden wird die natürliche Basis benutzt und die korrekte Notation der Tensoranalysis (kontravariant = hochgestellter Index, kovariant = tiefgestellter Index) verwendet. sei ein skalares Feld und ein Vektorfeld.
Es wird die Schreibweise verwendet. Weiterhin werden die Christoffel-Symbole , die durch definiert sind, sowie die kovariante Ableitung benutzt. Die kovariante Ableitung eines Skalars ist und die kovariante Ableitung eines Vektors ist bzw. .
- Gradient eines skalaren Feldes
- Gradient eines Tensorfeldes
- Für Tensoren der Stufe gibt es grundsätzlich zwei Möglichkeiten den Gradient zu definieren: Der Rechtsgradient als
- und der Linksgradient als
- .
- Hier wird im Folgenden die Rechtsversion verwendet.
- Gradient eines Vektorfeldes
- Gradient eines Tensors zweiter Stufe
- Divergenz eines Vektorfeldes
- Divergenz eines Tensorfeldes
- Für Tensoren der Stufe gibt es grundsätzlich zwei Möglichkeiten, die Divergenz zu definieren: Die Rechtsdivergenz als und die Linksdivergenz als . Hier wird im Folgenden die Rechtsversion verwendet.
- Divergenz eines Tensors zweiter Stufe
- Rotation eines Tensorfeldes
- Für Tensoren der Stufe gibt es grundsätzlich zwei Möglichkeiten, die Rotation zu definieren: Die Rechtsrotation als und die Linksrotation als . Hier wird im Folgenden die Rechtsversion verwendet:
- Rotation eines Vektorfeldes
- Laplace eines skalaren Feldes
Gradient und totales Differential
Im Folgenden soll der Gradient in krummlinigen Koordinaten hergeleitet werden. Das totale Differential des Ortsvektors lässt sich darstellen als:
Betrachte nun ein beliebiges Skalarfeld . Sein totales Differential lautet (wobei obige Darstellung von verwendet wird):
Der Gradient ist definiert über
und lässt sich also identifizieren als:
Für orthogonale Koordinaten ist ein kovarianter Basisvektor gleich und der dazu duale kontravariante Basisvektor . Somit der Gradient für orthogonale Koordinaten:
Für erhält man als Gradient den kontravarianten Basisvektor , also den Normalenvektor zur Koordinatenfläche .
Spezielle Christoffel-Symbole
Bei der Berechnung der Divergenz wird das Christoffel-Symbol benötigt. Dieses lässt sich durch die Determinante des metrischen Tensors ausdrücken:
was aus und folgender Beziehung folgt:
Somit erhält man für Divergenz und Laplace:
Divergenz in koordinatenfreier Darstellung
Die koordinatenfreie Definition der Divergenz führt diese als „Quellendichte“ ein:
Dabei ist ein beliebiges Volumen, wobei der Fluss über den Rand dieses Volumenelements integriert wird. Im Folgenden sei dieses Volumen ein (infinitesimal) kleines Parallelepiped am Raumpunkt , das von den Vektoren in Richtung der -Koordinatenlinien aufgespannt wird, d. h. jede Koordinate läuft im Intervall . Die Kantenlänge ist , wobei die Kanten nicht notwendigerweise orthogonal zueinander sind. Das Volumen berechnet sich im Allgemeinen zu:
Das Parallelepiped ist für jede Koordinate von den Flächen und begrenzt. Das Flächenelement für eine Koordinatenfläche lautet in drei Dimensionen
und der lokale Fluss durch dieses Flächenelement für das Vektorfeld ist:
Somit ist der Fluss durch die Fläche (nach außen zeigendes vektorielles Flächenelement, deswegen )
und der Fluss durch die Fläche
Dabei wurde der Integrand an der Stelle in erster Ordnung in entwickelt. Als Bilanz aus beiden erhält man
Analog für die beiden anderen Koordinaten
Somit lautet die Divergenz in natürlichen bzw. physikalischen Koordinaten :
Für orthogonale Koordinaten gilt:
Rotation in koordinatenfreier Darstellung
Die koordinatenfreie Definition der Rotation ist gegeben durch
Dabei ist eine beliebige Fläche mit Normaleneinheitsvektor , wobei das Linienintegral über den Rand dieser Fläche läuft.
Zunächst wird hier eine Fläche mit betrachtet. Die linke Seite wird dann zu:
Im Folgenden sei die Fläche ein (infinitesimal) kleines Parallelogramm am Raumpunkt , das von den Vektoren und aufgespannt wird. Der Flächeninhalt ist .
Als (geschlossener) Integrationsweg dienen die Kanten des Parallelogramms:
Mit gilt für sowie für und für sowie für .
Die Integrale über Weg 1 und 3 lassen sich zusammenfassen:
Entwickelt man den Integranden an der Stelle in erster Ordnung in , hängt der genäherte Integrand nur noch von ab, ist also unabhängig von und man kann das Integral einfach auswerten:
Eine analoge Vorgehensweise für die Integrale über Weg 2 und 4 ergibt:
Insgesamt erhält man die Zirkulation in der Fläche um das Parallelogramm .
Für werden aus den Näherungen exakte Relationen. Eingesetzt in obige Definitionsgleichung für die Rotation (alle Größen am Punkt ausgewertet)
Analog für die beiden anderen Koordinaten unter zyklischer Vertauschung. Somit lautet die Rotation mit :
Die (natürliche) kovariante Koordinate berechnet sich aus der (natürlichen) kontravarianten mittels . Des Weiteren gilt für physikalischen Koordinaten sowie .
Sind die Koordinaten orthogonal, gilt wegen die Beziehung sowie . Für orthogonale physikalische Koordinaten gilt also und die Rotation lautet für diesen Spezialfall:
Rotation als antisymmetrischer Tensor
Bei der Rotation treten Terme der Form , was sich zu partiellen Ableitungen vereinfachen lässt, da die Christoffelsymbole in den unteren Indizes symmetrisch sind:
Diese Größe stellt einen antisymmetrischen Tensor zweiter Stufe dar, den Rotor des Vektors .
Beispiele krummliniger Koordinatensysteme
Orthogonale Koordinatensysteme
- Zylinderkoordinaten:
- Kugelkoordinaten:
- Paraboloid-Koordinaten:
- Elliptische Zylinderkoordinaten:
- Gestreckte Sphäroid-Koordinaten:
- Abgeplattete Sphäroid-Koordinaten:
- Bipolar-Koordinaten:
- Ellipsoid-Koordinaten:
Nicht orthogonale Koordinatensysteme
- Alternative elliptische Zylinderkoordinaten:
Differentialgeometrie
Krummlinige Koordinaten lassen sich als Anwendung der Differentialgeometrie ansehen, speziell als Karte auf einer differenzierbaren Mannigfaltigkeit. Im Folgenden werden Zusammenhänge zum Kalkül der Differentialformen hergestellt, da mit diesen Berechnungen koordinatenunabhängig dargestellt werden können.
Differentialformen – allgemein
Sei eine -dimensionale differenzierbare Mannigfaltigkeit. Eine -Form ordnet jedem Punkt eine glatte alternierende -Multilinearform auf dem Tangentialraum zu. Dieses ist ein reellwertiges lineares Funktional, das -Tupeln von Vektorfeldern reelle Zahlen zuordnet:
Dabei ist selbst ein Element der äußeren Potenz des Tangentialraums, also von (es gilt dabei und ). Die Menge aller -Formen auf , also das Bündel beziehungsweise die disjunkte Vereinigung , bildet den Vektorraum . Diese Formen haben den großen Vorteil, dass man mit ihrer Hilfe kartenunabhängig auf einer Mannigfaltigkeit integrieren kann.
In der Tensoranalysis ist ein antisymmetrischer (wg. alternierend) kovarianter Tensor -ter Stufe (wg. -Multilinearform).
Differentialformen – Koordinatendarstellung
Sei ein offener Teil von und ein lokales Koordinatensystem (Karte) mit den lokalen Koordinaten . Dann bilden am Ort
die lokale Basis des Tangentialraums und
die dazu duale Basis (die Dualität drückt sich durch aus), also die Basis des Kotangentialraums , dies sind 1-Formen auf dem Vektorraum .
Das -fache äußere Produkt dieser 1-Formen (dabei ist assoziativ, bilinear und antikommutativ) ist eine -Form, wobei
eine Basis der äußeren Algebra über dem Kotangentialraum ist. Jede Differentialform hat auf allen Karten eine eindeutige Darstellung:
Eine 2-Form ist z. B.
was einem antisymmetrischen kovarianten Tensorfeld zweiter Stufe entspricht. Für erhält man also:
Verbindung zwischen Skalar- bzw. Vektorfeldern mit Differentialformen
Für differenzierbare Skalarfelder gilt die Identität: Glatte Funktionen sind identisch mit 0-Formen:
Durch folgende Isomorphie lässt sich einem differenzierbaren Vektorfeld eindeutig eine 1-Form zuordnen (dabei bezeichne das Skalarprodukt) (es wird die Einsteinsche Summenkonvention verwendet):
Mit Hilfe des Hodge-Stern-Operators (siehe unten) lassen sich einem Skalarfeld auch eine -Form zuordnen und einem Vektorfeld eine -Form.
Verknüpfung Tangential-/Kotangentialvektoren
Die musikalischen Operatoren (flat und sharp ) beschreiben Isomorphien, die durch die Riemannsche Metrik induziert werden, und Tangentialvektoren auf Kotangentialvektoren bzw. umgekehrt abbilden:
In Tensornotation entspricht dies dem Heben und Senken von Indizes.
Hodge-Stern-Operator
Für -dimensionale Vektorräume, die orientiert und euklidisch sind (somit muss einer orientierten Riemannschen Mannigfaltigkeit entsprechen), existiert ein kanonischer Isomorphismus, der alternierende Multilinearformen komplementären Grades (also und ) aufeinander abbildet. Dies ist der sog. Hodge-Stern-Operator:
Beide Vektorräume haben die Dimension .
Im dreidimensionalen Raum lässt sich somit einer 0-Form eine 3-Form zuordnen
und einer 1-Form eine 2-Form
Somit lässt sich einem differenzierbaren Vektorfeld nicht nur eine 1-Form sondern auch eine 2-Form zuordnen. Und eine differenzierbare skalare Funktion kann sowohl einer 0-Form wie auch einer 3-Form zugeordnet werden.
Durch die äußere Ableitung einer -Form entsteht eine -Form. Mit den musikalischen Operatoren und dem Hodge-Stern-Operator wird der De-Rham-Komplex gebildet. Die Verkettung zweier äußerer Ableitungen ist identisch Null. Hieraus lassen sich die Integralsätze der Vektoranalysis (Stokes, Gauß und Green) herleiten.
Einzelnachweise und Fußnoten
- ↑ William M. Boothby: An Introduction to Differential Manifolds and Riemannian Geometry. 2. überarbeitete Auflage. Academic Press, 2002.
- ↑ Normierte Vektoren werden nicht durch den Vektorpfeil, sondern durch den -Operator gekennzeichnet.
- ↑ Der Gradient einer Funktion gibt den Vektor des steilsten Anstiegs dieser Funktion an, der Skalar bzw. das Vektorfeld geben Quellen- bzw. Wirbeldichte des Vektorfeldes an. Ihre Bedeutung ist unabhängig von den benutzten Koordinaten.
Literatur
- Günter Bärwolff: Höhere Mathematik für Naturwissenschaftler und Ingenieure. 2. Auflage, 1. korrigierte Nachdruck. Spektrum Akademischer Verlag, München u. a. 2009, ISBN 978-3-8274-1688-9.
- Wolfgang Kühnel: Differentialgeometrie. Kurven – Flächen – Mannigfaltigkeiten. 4. überarbeitete Auflage. Vieweg, Wiesbaden 2008, ISBN 978-3-8348-0411-2.
- Siegfried Kästner: Vektoren, Tensoren, Spinoren. Eine Einführung in den Tensorkalkül unter Berücksichtigung der physikalischen Anwendung. 2. verbesserte Auflage. Akademie-Verlag, Berlin 1964.
- Murray R. Spiegel, Dennis Spellman, Seymour Lipschutz: Vector Analysis. Schaum’s Outlines. 2. Auflage. McGraw-Hill, 2009, ISBN 978-0-07-161545-7.
- Heinz Schade, Klaus Neemann: Tensoranalysis. 3. überarbeitete Auflage. de Gruyter, Berlin 2009, ISBN 978-3-11-020696-8.
- Klaus Jänich: Vektoranalysis. 5. Auflage. Springer-Verlag, Berlin 2005, ISBN 978-3-540-23741-9.
Weblinks










{kind=link}