Inversor von Hart
Der Inversor von Hart (auch Inversionsgetriebe von Hart) ist ein Geradführungsmechanismus und ein ebenes Koppelgetriebe, das eine Kreisbewegung in eine Geradenbewegung überführt und umgekehrt. Er ist mit dem Inversor von Peaucellier verwandt.[1] Die Funktionsweise basiert auf der Tatsache, dass ein Kreis durch den Mittelpunkt einer geometrischen Inversion stets als Gerade abgebildet wird.
Der Mechanismus wurde von Harry Hart (1848–1920) im Jahr 1874 gefunden und im folgenden Jahr veröffentlicht.[2] Der Hartsche Inversor hat sechs Glieder, die vier größeren bilden ein Antiparallelogramm. Die Bahnkurve eines Gliedpunktes ist insgesamt symmetrisch.[3] Es gibt noch eine zweite Form mit fünf Gliedern und A-förmigem Gestell (engl. A-frame). Sylvester und Kempe fanden eine Verallgemeinerung zu Harts Inversor, den sogenannten Quadruplanar-Inversor.[4]
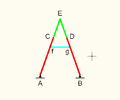
- Harts A-Frame – die kurzen Stangen sind halb so lang wie die langen Stangen, die zentrale Stange ist mit der langen Stange auf ein Viertel deren Länge verbunden
 Abmessungen:
Abmessungen:
AB = 4
AC = BD = 4
CE = ED = 2
Af = Bg = 3
fC = gD = 1
fg = 2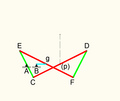 Abmessungen:
Abmessungen:
AB = Bg = 2
AC = AE = 3
CD = EF = 12
EC = FD = 6
Cp = pD = 6
Eg = 6
Literatur
- Hart: On Certain Conversions of Motion. In: Messenger of Mathematics. N. S. vol. 4 (1875), S. 82–88, 97–100, Hathi Trust (abgerufen am 25. März 2016)
- Hart: A Parallel Motion. In: Proceedings of the London Mathematical Society. vol. 6 (1874–1875), S. 137–139, Hathi Trust (abgerufen am 25. März 2016)
- Norbert Treitz: Physikalische Unterhaltungen: Das Antiparallelogramm (II). In: Spektrum der Wissenschaft. Mai 2006, spektrum.de (abgerufen am 25. März 2016)
Einzelnachweise
- ↑ Evert A. Dijksman: On the History of Focal Mechanisms and Their Derivatives. In: International Symposium on History of Machines and Mechanisms. Proceedings HMM2004, S. 303–314, Google Buch (abgerufen am 25. März 2016)
- ↑ Evert A. Dijksman: True Straight-line Linkages Having a Rectilinear Translating Bar. In: Advances in Robot Kinematics and Computational Geometry. 4th Workshop, 1994, S. 411–420,TU Eindhoven ( des vom 1. Juni 2020 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis. (abgerufen am 25. März 2016)
- ↑ Inversor (nach Hart), Mechanismenbeschreibung in der DMGLIB (abgerufen am 25. März 2016)
- ↑ Sylvester-Kempe Inversor, Kinematic Model by Martin Schilling, Smithsonian (abgerufen am 25. März 2016)
Weblinks
Auf dieser Seite verwendete Medien

(c) Doodle77, CC BY 4.0
Hart's A-frame, an exact straight line linkage. The short bars are half the length of the long bars. The center bar is attached to the long bars at 1/4 of their length. Animation made with Solvespace.

(c) Doodle77, CC BY 4.0
Hart's inversor, a straight line linkage, converts a circular motion to a straight line. This is a demonstration of inversive geometry. Links of the same color are the same length. The relative position of the fixed point, the input, and the output along their links is the same

.png)
Autor/Urheber: Wiki LIC, Lizenz: CC BY-SA 4.0
Geometría del Mecanismo de Hart (W)
AB = Bg = 2 AC = AE = 3 CD = EF = 12 EC = FD = 6 Cp = pD = 6
Eg = 6